ROS教程——1.1 入门
少儿编程 7年前 (2019-07-16) 3842浏览 0评论
目 录 ROS简介 ROS主要特征 ROS主要概念 基本的ROS命令 Turtles...
少儿编程 7年前 (2019-07-16) 3842浏览 0评论
目 录 ROS简介 ROS主要特征 ROS主要概念 基本的ROS命令 Turtles...
少儿编程 7年前 (2019-07-16) 3501浏览 0评论
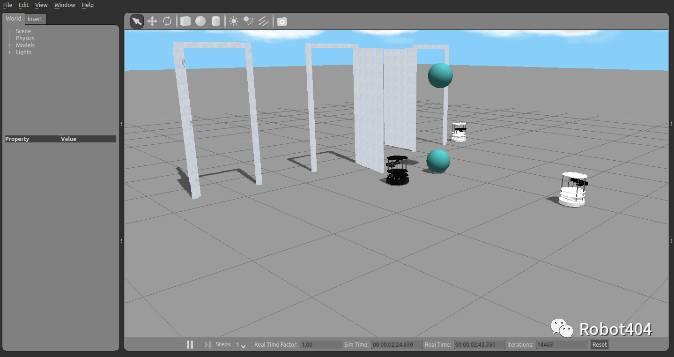
5.3.1 引言 本例程演示应用力和力矩到Gazebo仿真器中的模型的一些方法。首先,使用门作为图解验证了三种力矩应用的方法;其次,两个TurtleBot...
少儿编程 7年前 (2019-07-16) 3786浏览 0评论
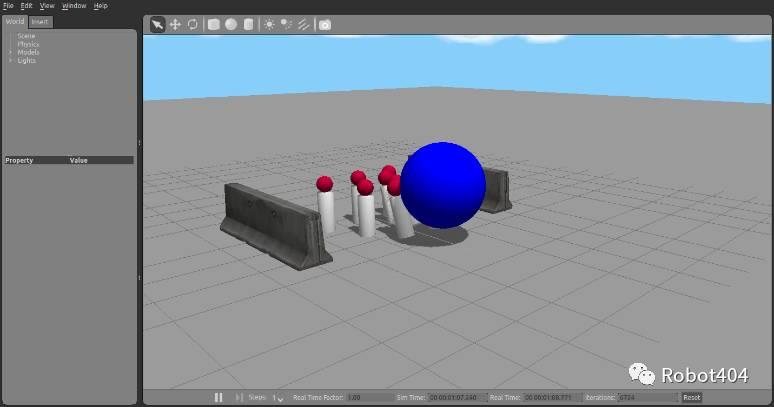
5.2.1 引言 本例程探索如何深层次地与MATLAB中的Gazebo仿真器交互。主题包括创建简单的模型、增加链接和加入模型、将模型连接在一起和应用力到物...
少儿编程 7年前 (2019-07-16) 2818浏览 0评论
4.6.1 引言 本例程演示使用TurtleBot实现VFH+壁障算法,使用定时器显示了自主算法的性能。VFH+算法是一个简单、局部的...
少儿编程 7年前 (2019-07-16) 2218浏览 0评论
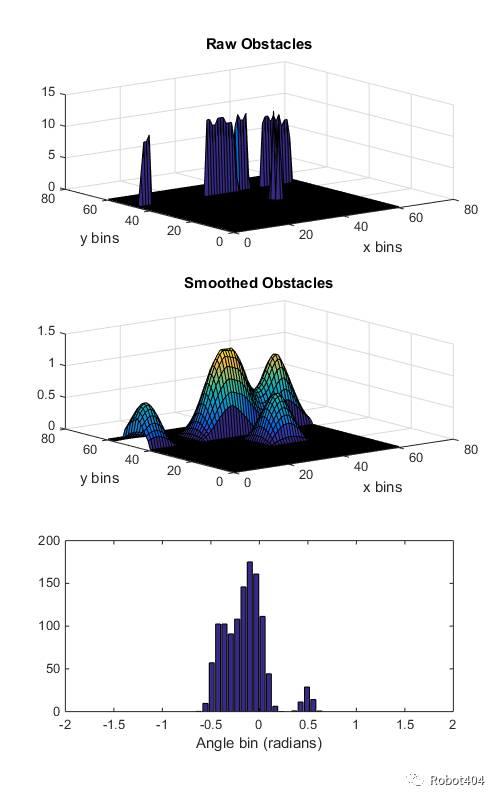
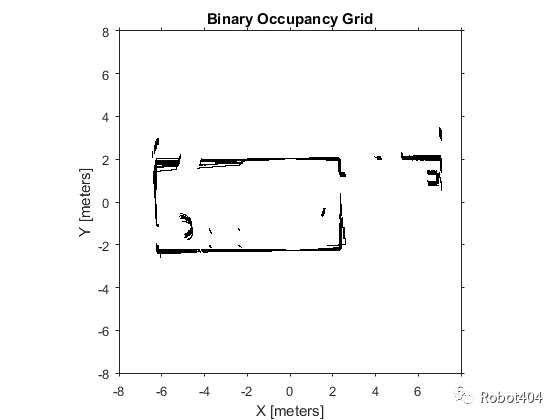
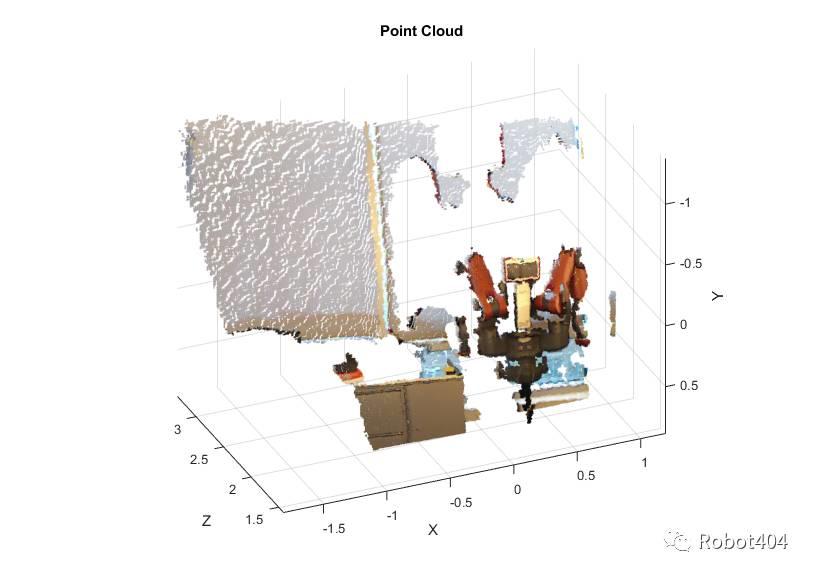
3.3.1 引言 该例程演示如何使用距离传感器的数据创建或更新地图,以及如何使用Robotics System Toolbox™中的转换函数(如“quat...
少儿编程 7年前 (2019-07-16) 2569浏览 0评论
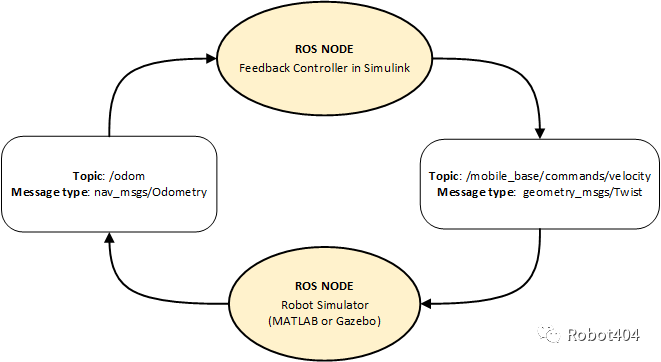
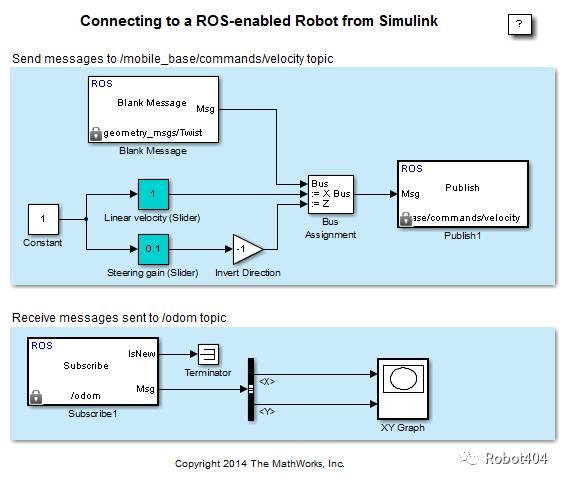
本例程将向用户展示如何使用Simulink控制仿真机器人运行于独立的基于ROS的仿真器。 2.3.1 引言 本例中,用户将会运行一个模型,实现一个简...
少儿编程 7年前 (2019-07-16) 2784浏览 0评论
本例程将向用户展示如何配置Simulink模型,用于发送和接收一个单独的基于ROS的仿真器,如Gazebo。 2.2.1 引言 用户可以使用Simu...
少儿编程 7年前 (2019-07-16) 4626浏览 0评论
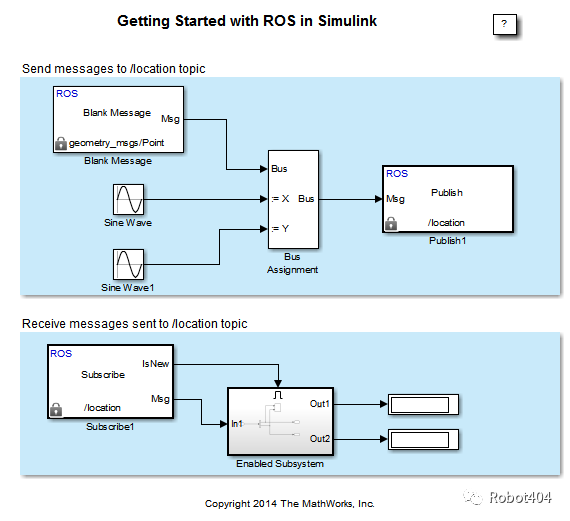
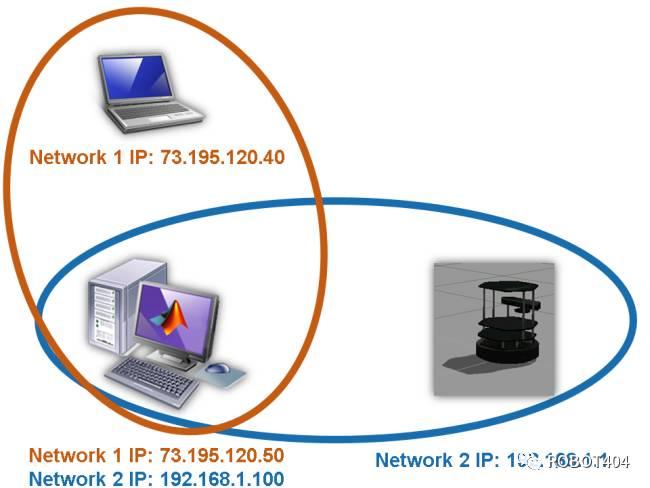
2.1 开始在Simulink中使用ROS 本例程展示如何使用Simulink在ROS网络中发送和接收消息。 2.1.1 引言 ...
少儿编程 7年前 (2019-07-16) 2880浏览 0评论
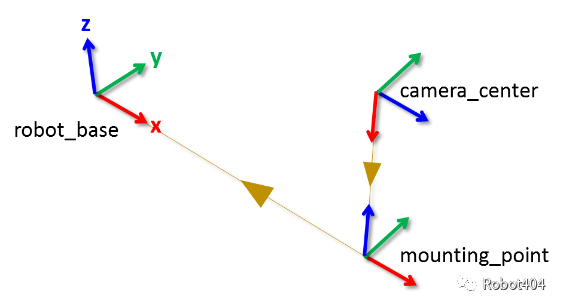
1.10.1 引言 ROS中的“tf”系统保持对多坐标系的跟踪并维护坐标系之间的关系于树型结构中。“tf”被分发,所以在ROS网络中的有关所有坐标系的信息...
少儿编程 7年前 (2019-07-16) 1965浏览 0评论
1.8 访问ROS参数服务器 1.8.1 引言 本例程将探索如何在ROS参数服务器上增加和恢复参数,参数服务器和ROS管理节点运行在相同的设备上。参数通...
少儿编程 7年前 (2019-07-16) 2932浏览 0评论
1.6 专业ROS消息的使用 1.6.1 引言 一些常见的ROS消息存储的格式,后期在使用之前需要进行转换。MATLAB能够帮助你转换常见的ROS消息格...
少儿编程 7年前 (2019-07-16) 2262浏览 0评论
1.5 基本ROS消息的使用 1.5.1 引言 在ROS数据交换中消息是最主要的容器,主题(通过发布器和订阅器交换数据)和服务(请求和提供服务)都是使用...
少儿编程 7年前 (2019-07-16) 3780浏览 0评论
今天,我给大家带来《Scratch入门教程系列》的第五讲《变装游戏(一)》。 基础准备 年龄要求:6岁+ 难度:简单 编写时间:...
少儿编程 7年前 (2019-07-12) 4243浏览 0评论
我们仍然用Python的海龟库来画图吧!这次还是逆着来,先编辑图形化代码,再看生成的Python代码。 上图依然是画花朵,不使用填充颜色的方法,而是用...
少儿编程 7年前 (2019-07-11) 4463浏览 0评论
Scratch对于键盘按键的支持仅限于二十六个字母、0-9十个数字、四个方向键、空格键以及“任意键”,且所谓的任意键仅局限于上述几种按键。...