KITTIodometry2rosbag
少儿编程 6年前 (2020-06-09) 3968浏览 0评论
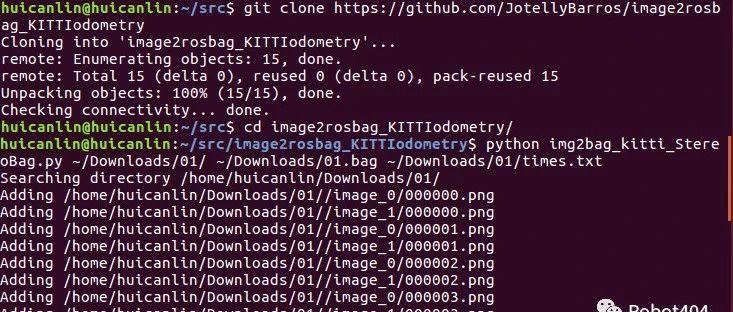
上一篇博文使用了KITTI odometry数据集的rosbag格式,今天简述如何将KITTI odometry原始数据集装换为rosbag格式。 ...
少儿编程 6年前 (2020-06-09) 3968浏览 0评论
上一篇博文使用了KITTI odometry数据集的rosbag格式,今天简述如何将KITTI odometry原始数据集装换为rosbag格式。 ...
少儿编程 6年前 (2020-06-09) 5910浏览 1评论
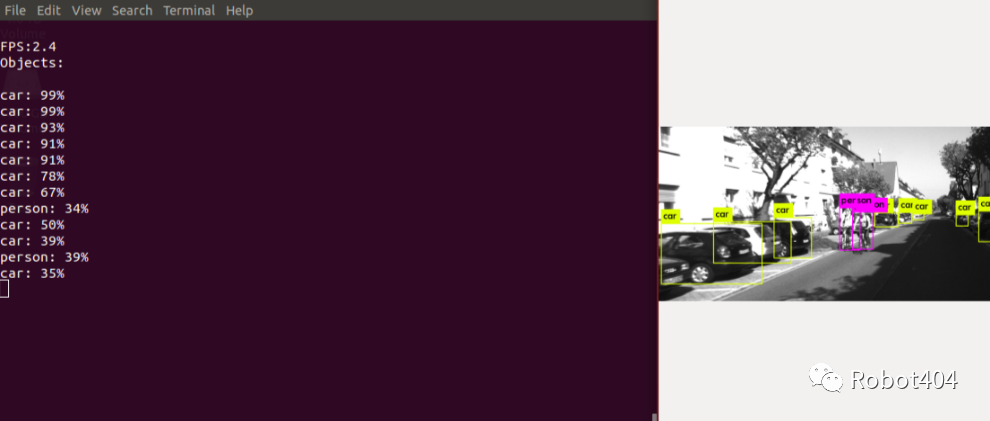
上一篇文章简述如何在ubuntu下安装nvidia GPU驱动、cuda和cudnn,并通过darknet+yolov3验证使用GPU进行目标检测。本文介绍...
少儿编程 6年前 (2020-06-09) 4366浏览 0评论
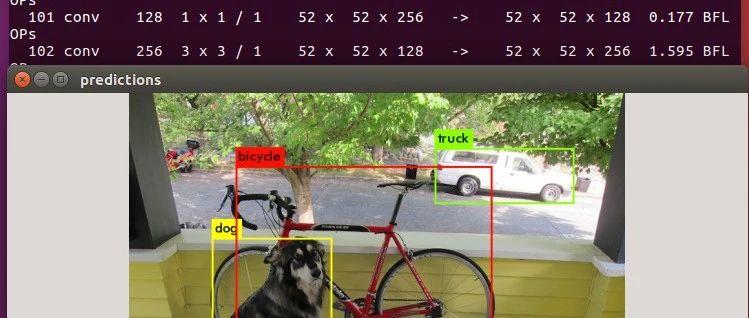
应用背景:darknet+yolov3训练自己数据,特定场景下小目标检测。使用CPU训练太慢,必须要上GPU才能提高速度,前期在别的计算机安装了nvidia...
少儿编程 6年前 (2020-04-11) 3821浏览 0评论
本文转载自古月居,原作者古月,原文链接:https://www.guyuehome.com/3316。 2019年4月19日,古月君受邀参加了中国...
少儿编程 6年前 (2020-04-11) 3923浏览 0评论
本文转载自古月居,原作者古月,原文链接:https://www.guyuehome.com/3190。古月居联合深蓝学院推出的“古月私房课”第一弹——《...
少儿编程 6年前 (2020-04-11) 4144浏览 0评论
本文转载自古月居,原作者古月,原文链接:https://www.guyuehome.com/3132。 古月居联合深蓝学院推出的“古月私房课”第一...
少儿编程 6年前 (2020-04-11) 3602浏览 0评论
本文转载自古月居,原作者古月,原文链接:https://www.guyuehome.com/3086。古月居联合深蓝学院推出的“古月私房课”第一弹——《...
少儿编程 6年前 (2020-04-11) 4102浏览 0评论
本文转载自古月居,原作者古月,原文链接:https://www.guyuehome.com/3036。 古月居联合深蓝学院推出的“古月私房课”第一...
少儿编程 6年前 (2020-04-11) 3849浏览 0评论
本文转载自古月居,原作者古月,原文链接:https://www.guyuehome.com/2988。 古月居联合深蓝学院推出的“古月私房课”第一...
少儿编程 6年前 (2020-04-11) 3782浏览 0评论
本文转载自古月居,原作者古月,原文链接:https://www.guyuehome.com/2933。 古月居联合深蓝学院推出的“古月私房课”第一...
少儿编程 6年前 (2020-04-11) 3970浏览 0评论
本文转载自古月居,原作者古月,原文链接:https://www.guyuehome.com/2889。 古月居联合深蓝学院推出的“古月私房课”第一...
少儿编程 6年前 (2020-04-11) 4004浏览 0评论
本文转载自古月居,原作者古月,原文链接:https://www.guyuehome.com/2839。 大家好,这里是《ROS机械臂开发:从入门到...
少儿编程 6年前 (2020-04-11) 3890浏览 0评论
本文转载自古月居,原作者古月,原文链接:https://www.guyuehome.com/2789。 大家好,这里是《ROS机械臂开发:从入门到...
少儿编程 6年前 (2020-04-11) 3092浏览 0评论
本文转载自古月居,原作者古月,原文链接:https://www.guyuehome.com/2697。 大家好,这里是《ROS机械臂开发:从入门到实战》的...
少儿编程 6年前 (2020-04-11) 3050浏览 0评论
本文转载自古月居,原作者古月,原文链接:https://www.guyuehome.com/2685。 古月居联合深蓝学院推出的“古月私房课”第一...