第4章 TurtleBot 应用例程——4.1 开始使用实际的TurtleBot
少儿编程 7年前 (2019-07-16) 1876浏览 0评论
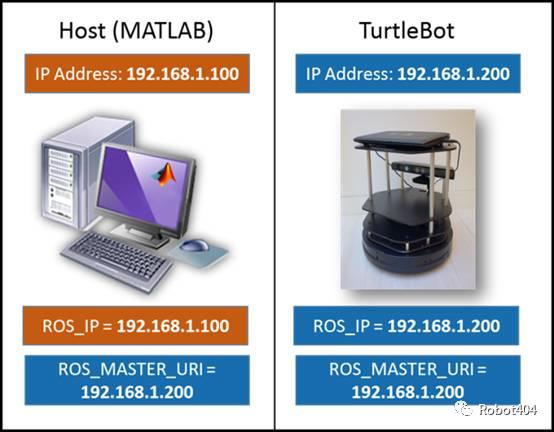
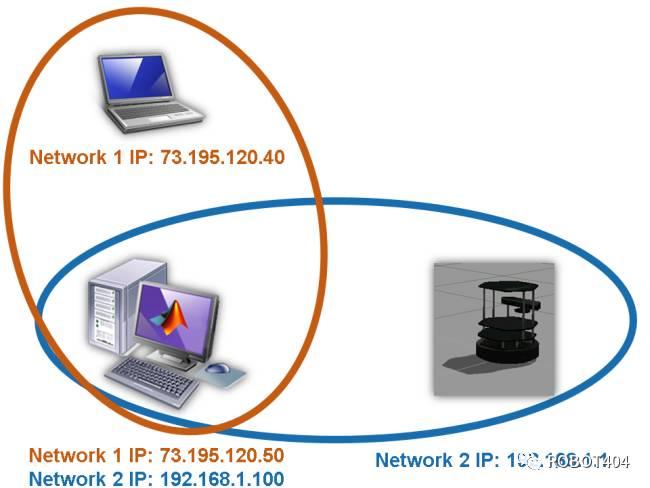
4.1.1 引言 本例程演示如何使用MATLAB的ROS接口连接到TurtleBot,用户可以使用该接口从MATLAB连接到许多ROS支持的硬件。用户也可...
少儿编程 7年前 (2019-07-16) 1876浏览 0评论
4.1.1 引言 本例程演示如何使用MATLAB的ROS接口连接到TurtleBot,用户可以使用该接口从MATLAB连接到许多ROS支持的硬件。用户也可...
少儿编程 7年前 (2019-07-16) 2117浏览 0评论
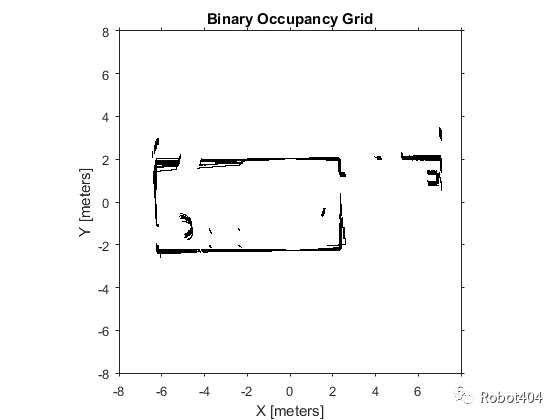
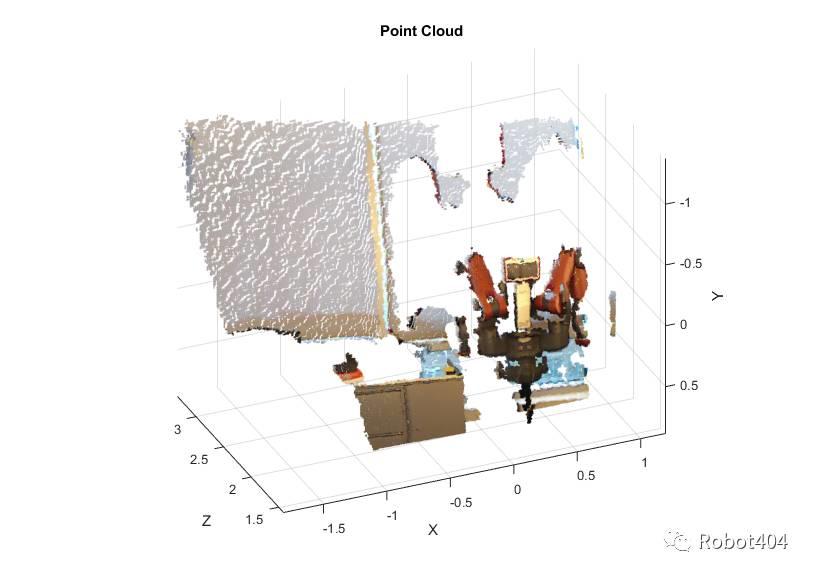
3.3.1 引言 该例程演示如何使用距离传感器的数据创建或更新地图,以及如何使用Robotics System Toolbox™中的转换函数(如“quat...
少儿编程 7年前 (2019-07-16) 3043浏览 0评论
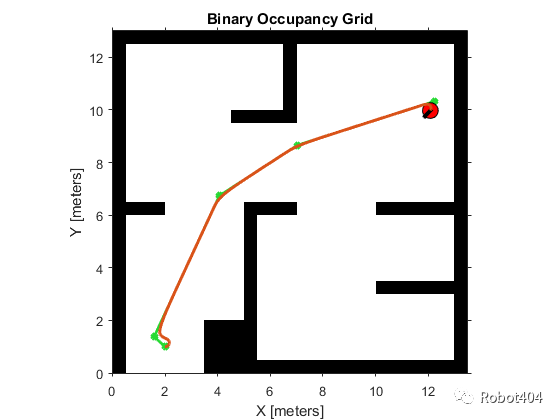
3.2.1 引言 该例程演示如何使用机器人运动模型控制机器人跟踪目标路径。该例程使用“Pure Persuit”路径跟踪控制器驱动仿真机器人沿着预先决定的...
少儿编程 7年前 (2019-07-16) 2970浏览 0评论
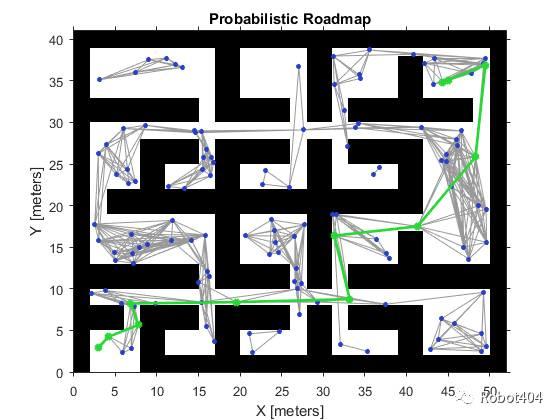
3.1.1 引言 本例程演示如何使用PRM(Probabilistic Roadmap)路径规划器在给定地图计算两个位置之间的无障碍路径。PRM路径规划器...
少儿编程 7年前 (2019-07-16) 2864浏览 0评论
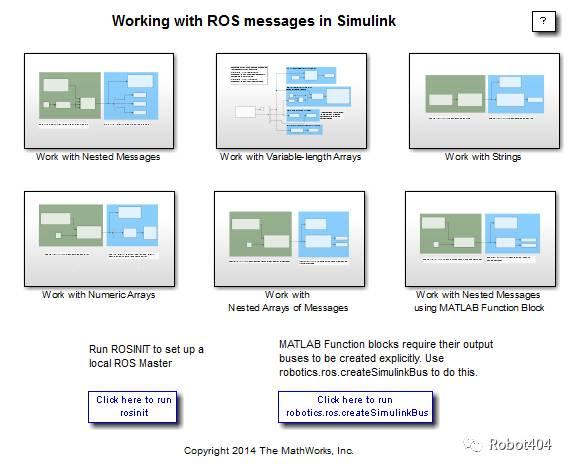
本例程展示如何在Simulink中使用复杂的ROS消息,例如带有嵌套子消息的消息或者多长度阵列消息。 2.5.1 引言 ROS消息在Simulink...
少儿编程 7年前 (2019-07-16) 3113浏览 0评论
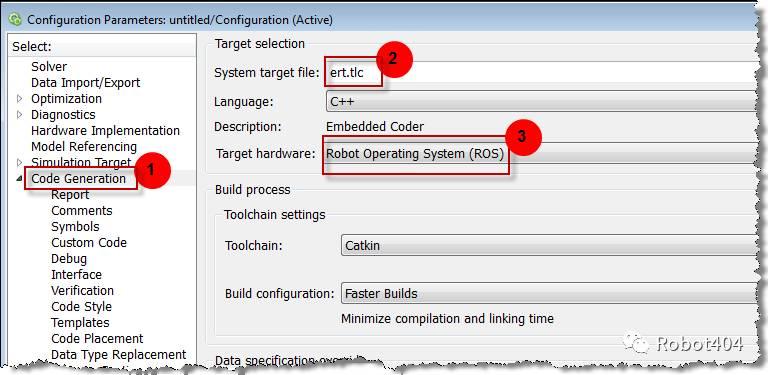
本例程向用户展示如何从Simulink模型生成和编译一个单独的ROS节点。 2.4.1 引言 在本例,用户将会配置一个模型为一个单独的ROS节点生成...
少儿编程 7年前 (2019-07-16) 2500浏览 0评论
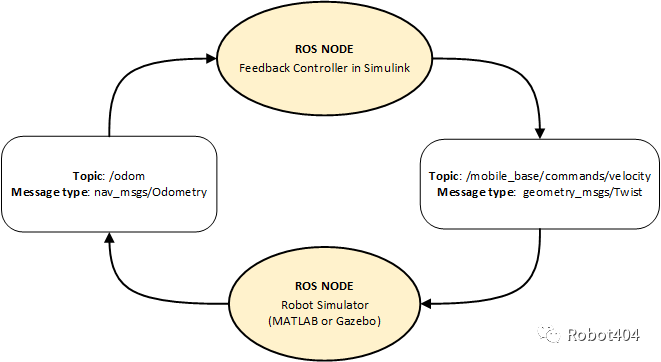
本例程将向用户展示如何使用Simulink控制仿真机器人运行于独立的基于ROS的仿真器。 2.3.1 引言 本例中,用户将会运行一个模型,实现一个简...
少儿编程 7年前 (2019-07-16) 2704浏览 0评论
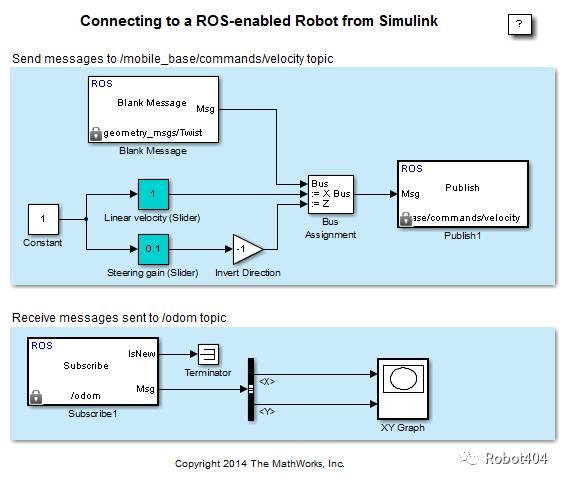
本例程将向用户展示如何配置Simulink模型,用于发送和接收一个单独的基于ROS的仿真器,如Gazebo。 2.2.1 引言 用户可以使用Simu...
少儿编程 7年前 (2019-07-16) 4557浏览 0评论
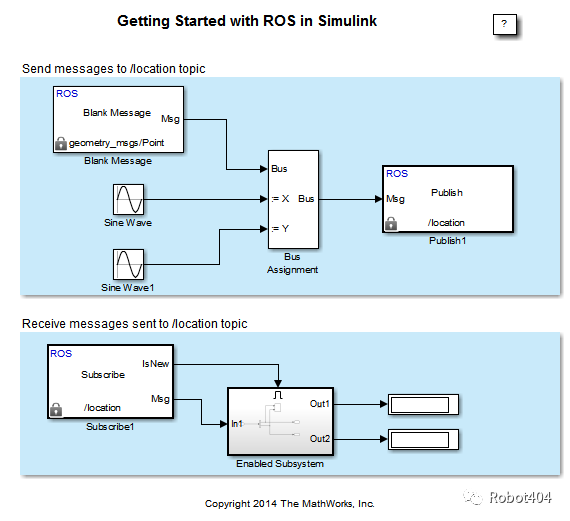
2.1 开始在Simulink中使用ROS 本例程展示如何使用Simulink在ROS网络中发送和接收消息。 2.1.1 引言 ...
少儿编程 7年前 (2019-07-16) 2768浏览 0评论
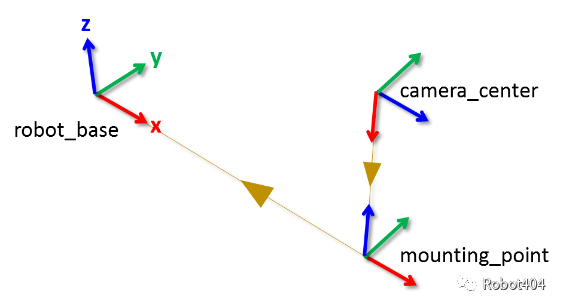
1.10.1 引言 ROS中的“tf”系统保持对多坐标系的跟踪并维护坐标系之间的关系于树型结构中。“tf”被分发,所以在ROS网络中的有关所有坐标系的信息...
少儿编程 7年前 (2019-07-16) 2948浏览 0评论
1.9 rosbag Logfiles的使用 1.9.1 引言 预备知识:1.5 基本ROS消息的使用。 1.9.2 载入rosbag 使用“r...
少儿编程 7年前 (2019-07-16) 1882浏览 0评论
1.8 访问ROS参数服务器 1.8.1 引言 本例程将探索如何在ROS参数服务器上增加和恢复参数,参数服务器和ROS管理节点运行在相同的设备上。参数通...
少儿编程 7年前 (2019-07-16) 1970浏览 0评论
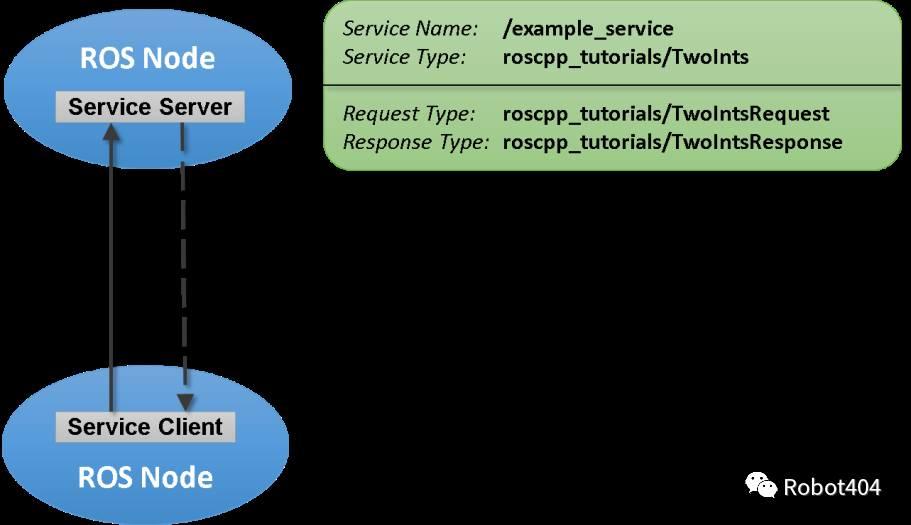
1.7 请求和提供服务 1.7.1 引言 ROS支持两种主要的通信机制:话题和服务。话题拥有发布器和订阅器,用于发送和接收消息(参阅使用发布器和订阅器交...
少儿编程 7年前 (2019-07-16) 2808浏览 0评论
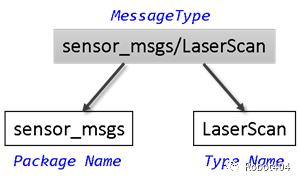
1.6 专业ROS消息的使用 1.6.1 引言 一些常见的ROS消息存储的格式,后期在使用之前需要进行转换。MATLAB能够帮助你转换常见的ROS消息格...
少儿编程 7年前 (2019-07-16) 2163浏览 0评论
1.5 基本ROS消息的使用 1.5.1 引言 在ROS数据交换中消息是最主要的容器,主题(通过发布器和订阅器交换数据)和服务(请求和提供服务)都是使用...