ROS探索总结(58)– 古月私房课 | ROS的过去、现在和未来
少儿编程 6年前 (2020-04-11) 3081浏览 0评论
本文转载自古月居,原作者古月,原文链接:https://www.guyuehome.com/2632。 古月居联合深蓝学院推出的“古月私房课”第一...
少儿编程 6年前 (2020-04-11) 3081浏览 0评论
本文转载自古月居,原作者古月,原文链接:https://www.guyuehome.com/2632。 古月居联合深蓝学院推出的“古月私房课”第一...
少儿编程 6年前 (2020-04-11) 3685浏览 0评论
本文转载自古月居,原作者古月,原文链接:https://www.guyuehome.com/2263。 简单来讲,两者的主要功能不同,没办法比较哪...
少儿编程 6年前 (2020-04-11) 2848浏览 0评论
本文转载自古月居,原作者古月,原文链接:https://www.guyuehome.com/2256。 仿真/模拟(Simulation),泛指基...
少儿编程 6年前 (2020-04-11) 2886浏览 0评论
本文转载自古月居,原作者古月,原文链接:https://www.guyuehome.com/2213。 机器人系统中存在大量数据,这些数据在计算过程中往往...
少儿编程 6年前 (2020-04-11) 2432浏览 0评论
本文转载自古月居,原作者古月,原文链接:https://www.guyuehome.com/2195。 每当我们需要运行一个ROS节点或工具时,都...
少儿编程 6年前 (2020-04-11) 2496浏览 0评论
本文转载自古月居,原作者古月,原文链接:https://www.guyuehome.com/2192。 Windows官方终于支持ROS了! ...
少儿编程 6年前 (2020-04-11) 2777浏览 0评论
本文转载自古月居,原作者古月,原文链接:https://www.guyuehome.com/2120。 8月1日晚,古月君在深蓝学院的的公开课平台,和大家...
少儿编程 6年前 (2020-03-18) 2919浏览 0评论
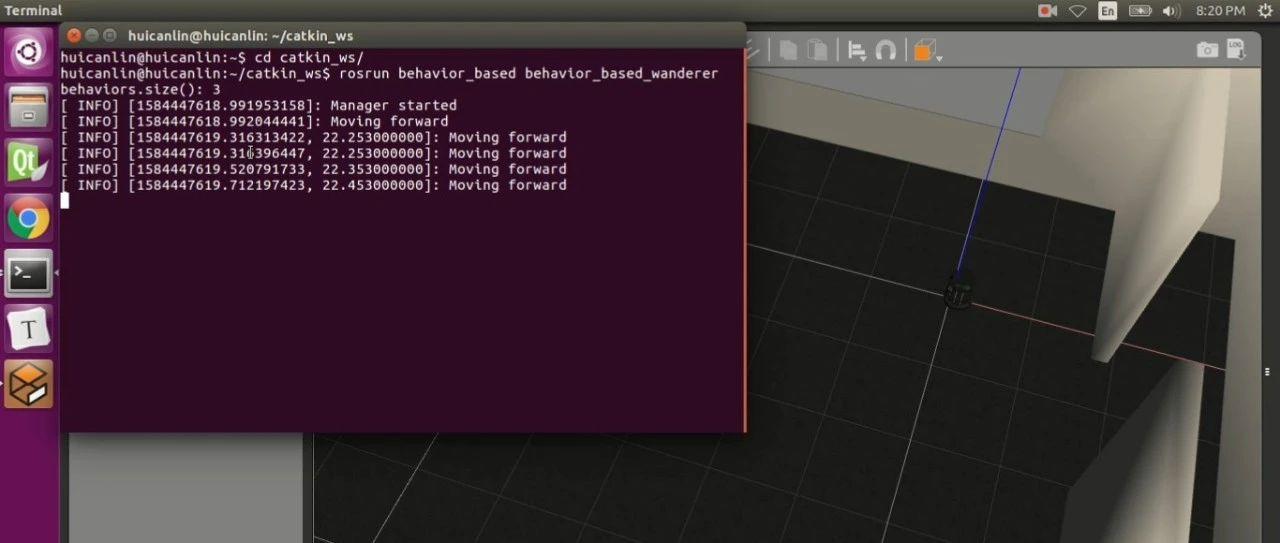
本文简介基于行为的机器人的概念和机器人控制思想,基于ROS使用gazebo进行了编程实践演练。演练中的环境采用柳树车库办公室场景,机器人使用了turtl...
少儿编程 6年前 (2020-03-14) 4112浏览 0评论
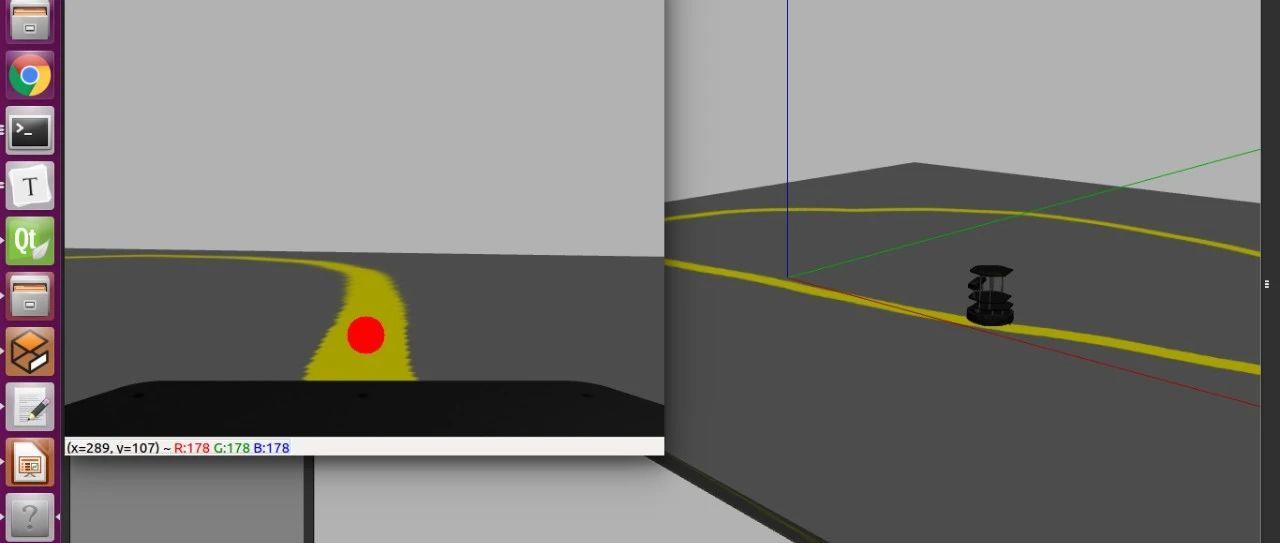
1.10.1 简介OpenCV OpenCV是开源计算机视觉库,由英特尔创建/维护,包含许多流行的计算机视觉算法的实现,高效且经过充分测试,专注于实时图像...
少儿编程 6年前 (2020-03-11) 4444浏览 0评论
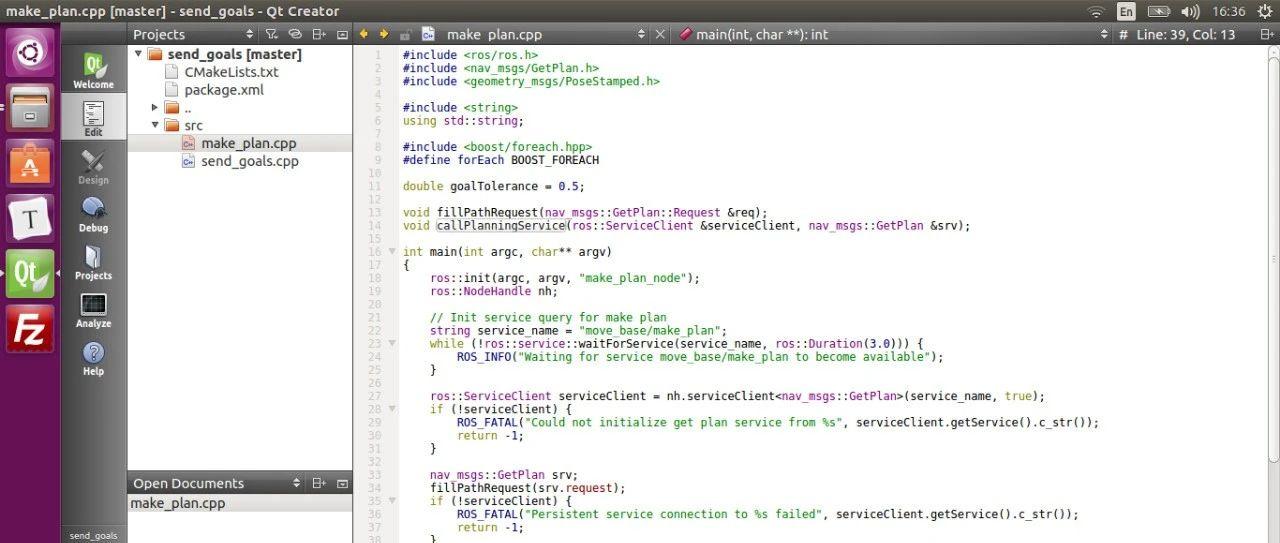
对于Github上获取的优秀程序,光在文本阅读器上阅读,想要读懂程序结构进而深入学习程序和算法,效率不高。工欲善其事必先利其器,因此搜索如何在ubunt...
少儿编程 6年前 (2020-03-11) 4868浏览 0评论
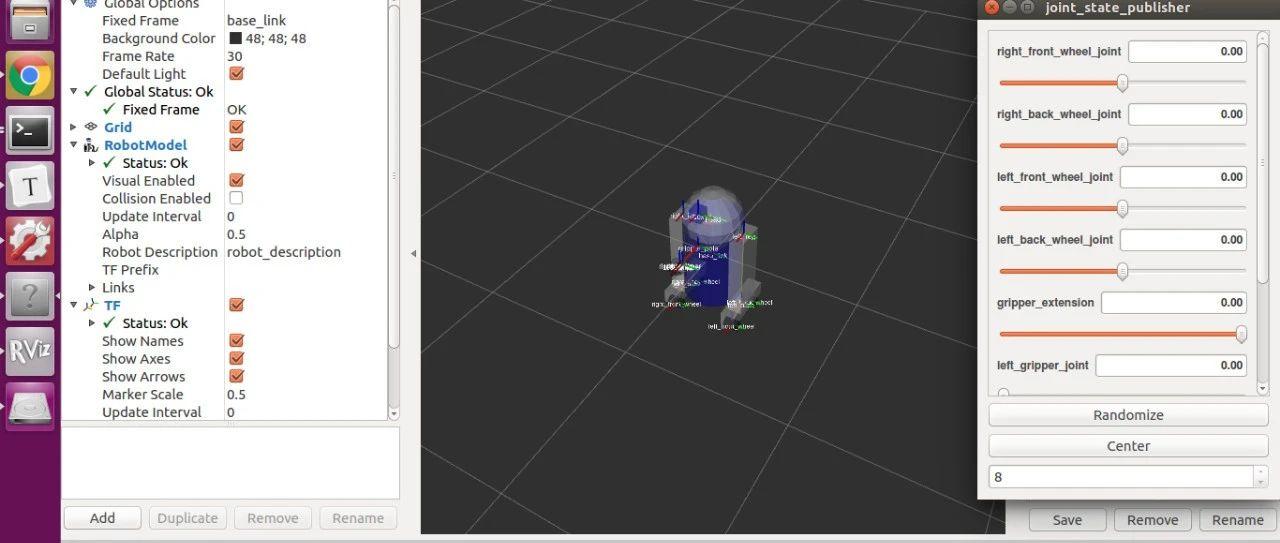
1.9.1 使用URDF构建机器人模型 统一机器人描述格式(Unified Robot Description Format , URDF)是一种XML格...
少儿编程 6年前 (2020-03-11) 3876浏览 0评论
1.8.1 ROS actions 尽管服务(service)对于简单的获取/设置交互(例如查询状态和管理配置)非常方便,但它们不适用于长时间运行的任务。...
少儿编程 7年前 (2019-09-09) 6307浏览 0评论
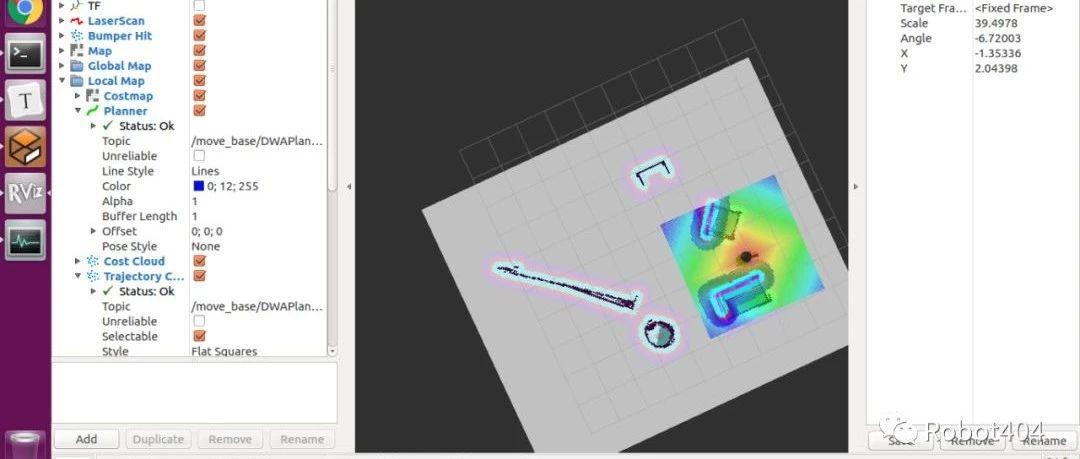
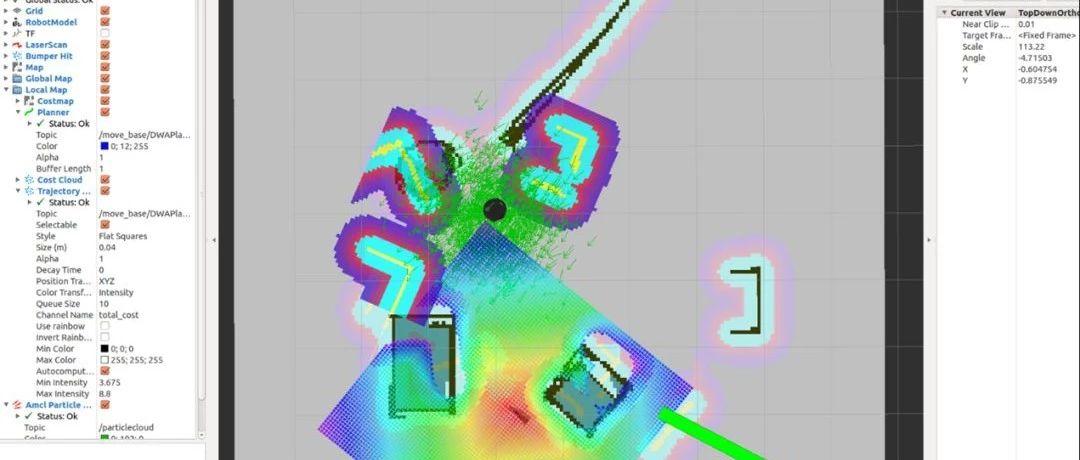
1.7.1 机器人导航 机器人最基本功能之一就是在环境中运动。为了有效地做到这一点,机器人需要知道它在哪里以及应该去哪里。通常情况下,需要为机器人提供环境...

少儿编程 7年前 (2019-07-16) 5911浏览 0评论
1.6.1 ROS的变换系统(TF) (1)TF简介 什么是TF。机器人系统通常具有许多随时间变化的坐标系,例如世界坐标系、基座坐标系、夹持器坐标系、头...
少儿编程 7年前 (2019-07-16) 8678浏览 0评论
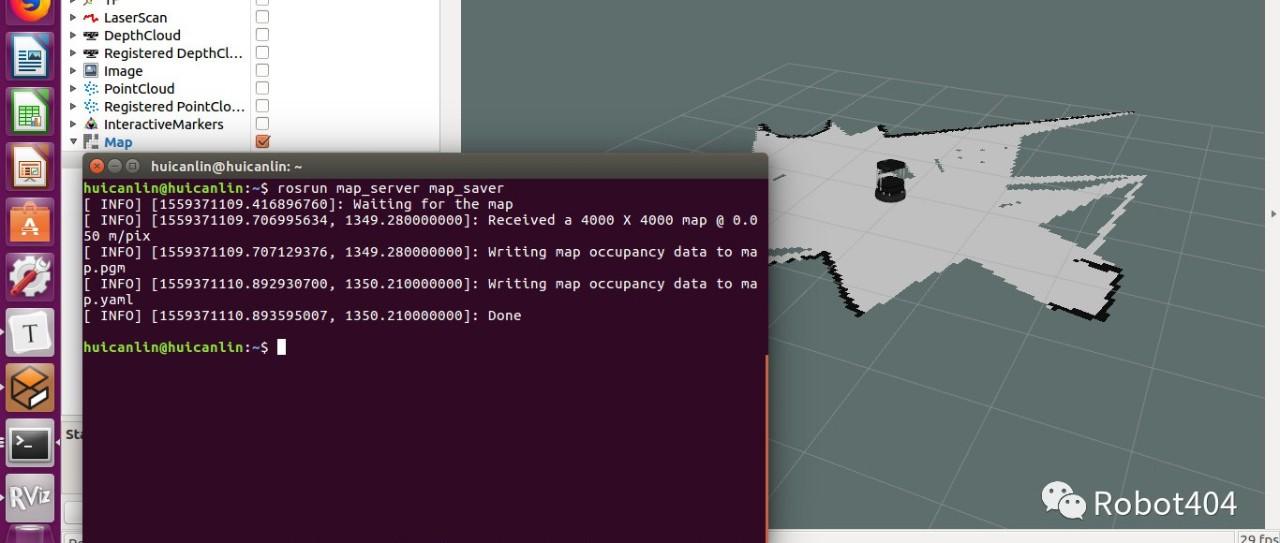
1.5.1 引言1.5.2 地图构建1.5.3 可视化工具rviz1.5.4 ROS 服务1.5.5 载入地图练习题 1.5.1 引言 为什么需...