初识MATLAB-ROS工具箱——1.4 使用发布器和订阅器交换数据
少儿编程 7年前 (2019-07-16) 2440浏览 0评论
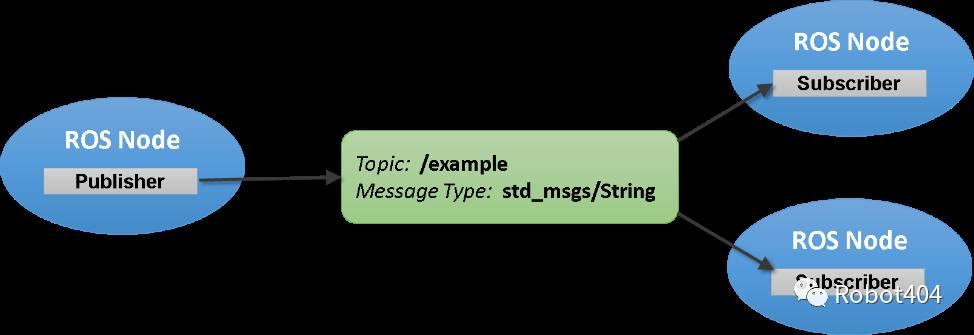
1.4 使用发布器和订阅器交换数据 1.4.1 引言 ROS节点最基本的交换数据的方式是发送和接收消息。消息通过主题传输,在ROS网...
少儿编程 7年前 (2019-07-16) 2440浏览 0评论
1.4 使用发布器和订阅器交换数据 1.4.1 引言 ROS节点最基本的交换数据的方式是发送和接收消息。消息通过主题传输,在ROS网...
少儿编程 7年前 (2019-07-16) 1972浏览 0评论
1.3 连接到ROS网络 1.3.1 引言 一个ROS网络包含一个ROS主控节点和多个ROS节点,ROS主控节点通过与所有活动的ROS实体保持联系使...
少儿编程 7年前 (2019-07-16) 1986浏览 0评论
1.2.1 引言 机器人操作系统(Robot Operating System ROS)是一个能够让机器人系统的不同部分发现、传输和接收数据的通信接口。M...
少儿编程 7年前 (2019-07-16) 2561浏览 0评论
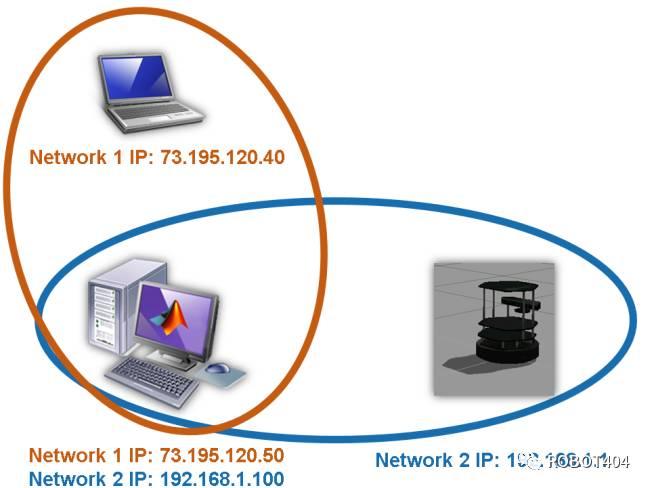
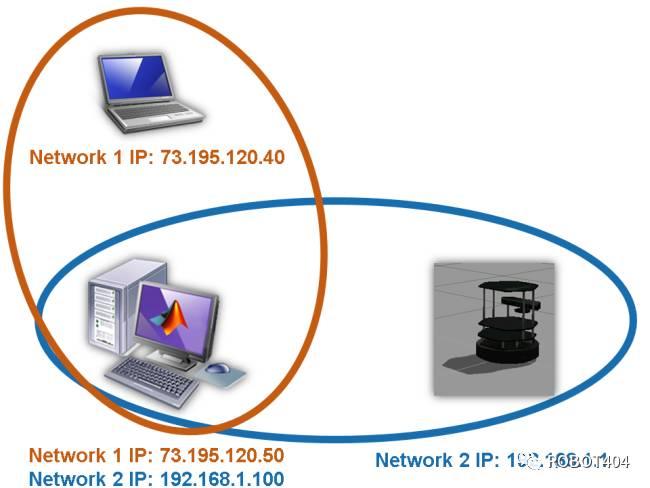
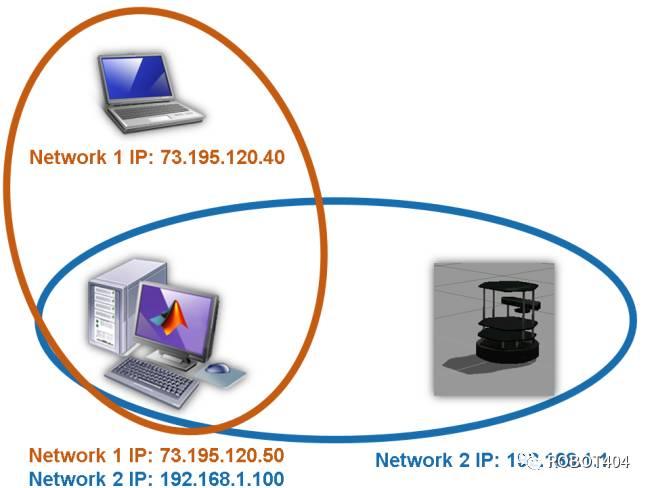
1.1 ROS网络设置 1.1.1 引言 设置ROS网络使得不同的设备之间能够通信。不同的参与者或者节点通过注册到同一个ROS主控节点实现信息共享。RO...

少儿编程 7年前 (2019-07-12) 3124浏览 0评论
本篇文章将使用树莓派与 ReSpeaker 4-Mic Array for Raspberry Pi 来完成语音识别的功能;并使用 ROS 1.0 系统...

少儿编程 7年前 (2019-06-19) 2588浏览 0评论
之前的课程介绍了ROS系统以及安装方法,作为一个开源系统,网络上拥有众多的学习资源,最经典的不外乎是 ROS 系统的官方教学文件—「 ROS tutor...

少儿编程 7年前 (2019-06-10) 2577浏览 0评论
之前的课程简略地介绍了 ROS 系统,相信大家对于 ROS 系统已经有了初步的概念。 本篇文章将会详细介绍如何自行安装 ROS系统。 安装的...
少儿编程 7年前 (2019-03-14) 3283浏览 0评论
ROS, 55家以上世界级企业使用的机器人系统 ROS industrial consortium 成员 ( 图片来源: h...

少儿编程 7年前 (2019-03-14) 2955浏览 0评论
由上图可以看到,在PC端的系统有Windows、Linux与Mac,而在手持系装置有Android和iOS占大宗,看来ROS的目标就...
少儿编程 8年前 (2018-11-23) 4913浏览 0评论
TEB轨迹规划算法教程-常见问题 说明: 介绍使用TEB轨迹规划算法常见问题以及解决 问题A 为什么我的机器人导航太靠近墙壁和/...
少儿编程 8年前 (2018-11-23) 3911浏览 0评论
TEB轨迹规划算法教程-代价地图转换插件实现追踪和动态避障 说明: 介绍如何利用代价地图转换插件根据代价地图的更新来跟踪动态障碍 ...
少儿编程 8年前 (2018-11-23) 2560浏览 0评论
TEB轨迹规划算法教程-增加动态障碍 说明: 介绍如何在teb_local_planner中包含动态障碍。 在之前的教程中,您学习了...
少儿编程 8年前 (2018-11-23) 3145浏览 0评论
TEB轨迹规划算法教程-增加静态障碍 说明: 介绍如何增加静态障碍 障碍物: 对于某些应用程序,您可能不想依赖于代价地图,或者您...
少儿编程 8年前 (2018-11-23) 3092浏览 0评论
TEB轨迹规划算法教程-差速车型路径规划 说明: 介绍如何实现在差速车上使用teb轨迹规划算法 步骤: 安装teb_local_...
少儿编程 8年前 (2018-11-23) 3989浏览 0评论
TEB轨迹规划算法教程-全向轮机器人路径规划 说明: 介绍如何设置全向轮机器人的规划器 规划器配置: 通常,全向机器人能够遵循对...