少儿python编程(7)海龟画图(拓展1)
少儿编程 7年前 (2019-07-16) 3557浏览 0评论
我们继续用Python的海龟库来画图吧! 上图是画一朵花的程序,重点是6-12行,使用了函数来定义drawleaf:每一掰叶子由两条弧线组成,每一条弧...
少儿编程 7年前 (2019-07-16) 3557浏览 0评论
我们继续用Python的海龟库来画图吧! 上图是画一朵花的程序,重点是6-12行,使用了函数来定义drawleaf:每一掰叶子由两条弧线组成,每一条弧...

少儿编程 7年前 (2019-07-16) 5790浏览 0评论
1.6.1 ROS的变换系统(TF) (1)TF简介 什么是TF。机器人系统通常具有许多随时间变化的坐标系,例如世界坐标系、基座坐标系、夹持器坐标系、头...
少儿编程 7年前 (2019-07-16) 3324浏览 0评论
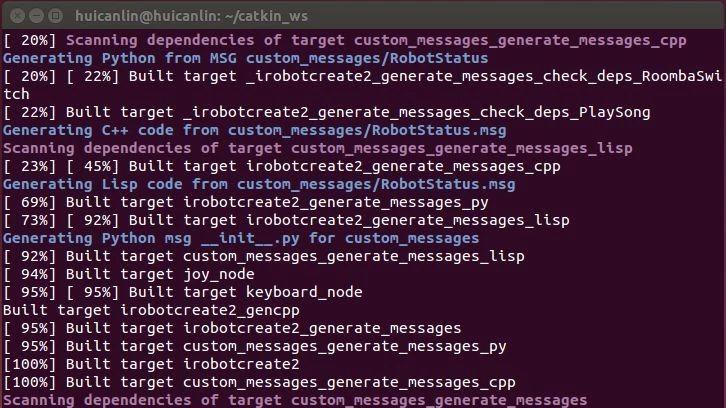
ROS提供了较为丰富的内置消息类型,如"std_msgs"包定义了原始消息类型: 上述原始类型用于构建ROS中使用的所有消息类型,例如,(大部分的...
少儿编程 7年前 (2019-07-16) 3783浏览 0评论
目 录 ROS简介 ROS主要特征 ROS主要概念 基本的ROS命令 Turtles...
少儿编程 7年前 (2019-07-16) 2153浏览 0评论
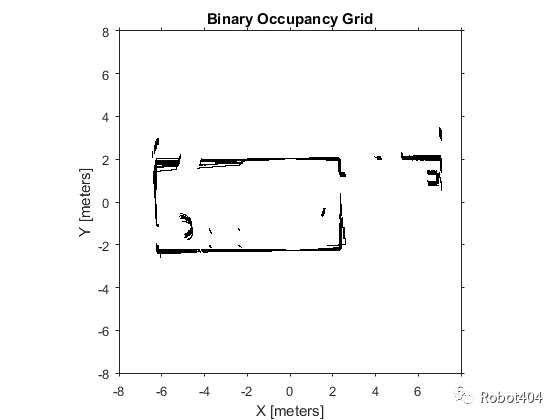
3.3.1 引言 该例程演示如何使用距离传感器的数据创建或更新地图,以及如何使用Robotics System Toolbox™中的转换函数(如“quat...
少儿编程 7年前 (2019-07-16) 3076浏览 0评论
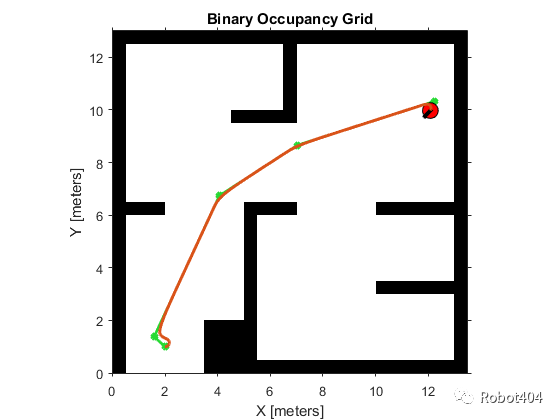
3.2.1 引言 该例程演示如何使用机器人运动模型控制机器人跟踪目标路径。该例程使用“Pure Persuit”路径跟踪控制器驱动仿真机器人沿着预先决定的...
少儿编程 7年前 (2019-07-16) 2921浏览 0评论
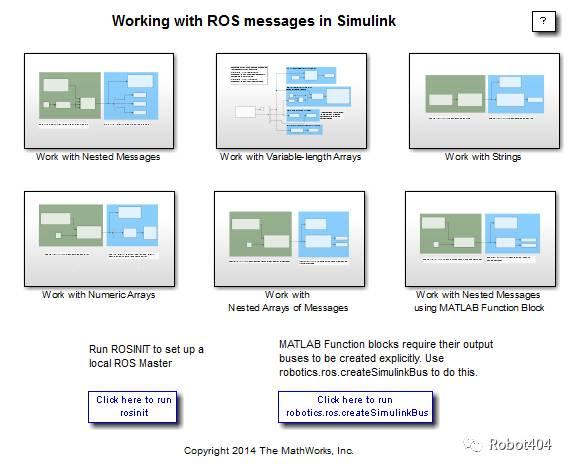
本例程展示如何在Simulink中使用复杂的ROS消息,例如带有嵌套子消息的消息或者多长度阵列消息。 2.5.1 引言 ROS消息在Simulink...
少儿编程 7年前 (2019-07-16) 3156浏览 0评论
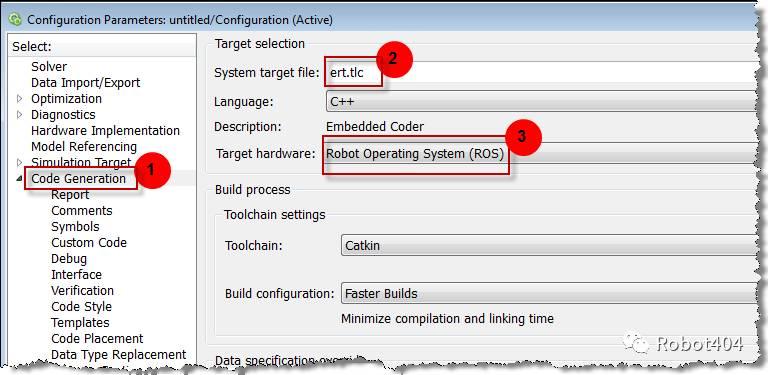
本例程向用户展示如何从Simulink模型生成和编译一个单独的ROS节点。 2.4.1 引言 在本例,用户将会配置一个模型为一个单独的ROS节点生成...
少儿编程 7年前 (2019-07-16) 2736浏览 0评论
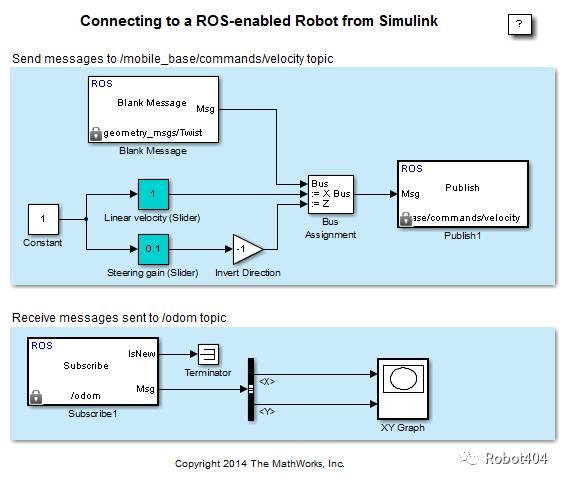
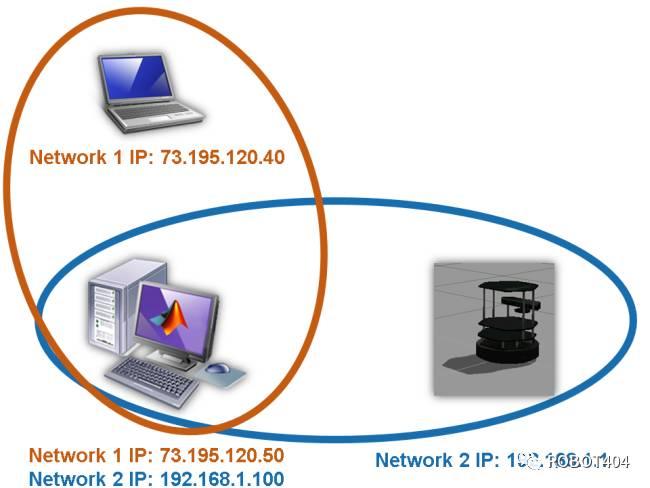
本例程将向用户展示如何配置Simulink模型,用于发送和接收一个单独的基于ROS的仿真器,如Gazebo。 2.2.1 引言 用户可以使用Simu...
少儿编程 7年前 (2019-07-16) 4588浏览 0评论
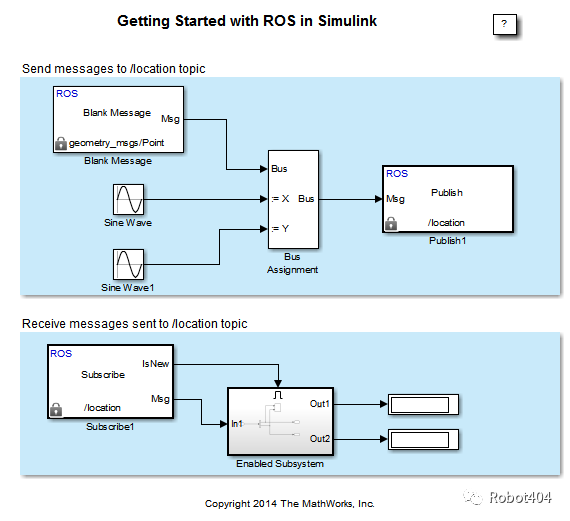
2.1 开始在Simulink中使用ROS 本例程展示如何使用Simulink在ROS网络中发送和接收消息。 2.1.1 引言 ...
少儿编程 7年前 (2019-07-16) 1907浏览 0评论
1.2.1 引言 机器人操作系统(Robot Operating System ROS)是一个能够让机器人系统的不同部分发现、传输和接收数据的通信接口。M...

少儿编程 7年前 (2019-07-15) 3381浏览 0评论
Hello,小可爱们,今天周日 我来向大家报道啦。 没错,今天要po出我们的第2节视频课啦 ~等等等等~ 花了30...

少儿编程 7年前 (2019-07-15) 3969浏览 0评论
Hi~ o(* ̄▽ ̄*)ブ,大朋友和小可爱们 这次为大家准备了文字音频,边听边学吧 // -----------第006个知识点: 下一造...

少儿编程 7年前 (2019-07-15) 5569浏览 0评论
打 妖 怪 这个小游戏是在Chris的强烈要求下在上一篇打地鼠的基础上进行改编的,主要是因为他放学后看到姐姐在玩打地鼠的游戏后...

少儿编程 7年前 (2019-07-11) 3134浏览 0评论
少儿编程有利于提高孩子综合能力 已成STEAM教育重要的一环 在介绍少儿编程前,首先了解下少儿编程与我们通常所认为的编程的区别。编程是让计算机代为解决某...