Go语言字符串截取(获取字符串的某一段字符)
少儿编程 7年前 (2019-07-16) 3676浏览 0评论
获取字符串的某一段字符是开发中常见的操作,我们一般将字符串中的某一段字符称做子串(substring)。下面例子中使用 strings.Index() 函数在字...
少儿编程 7年前 (2019-07-16) 3676浏览 0评论
获取字符串的某一段字符是开发中常见的操作,我们一般将字符串中的某一段字符称做子串(substring)。下面例子中使用 strings.Index() 函数在字...
少儿编程 7年前 (2019-07-16) 3540浏览 0评论
Go 语言的内建函数 len(),可以用来获取切片、字符串、通道(channel)等的长度。下面的代码可以用 len() 来获取字符串的长度。 tip1 :=...

少儿编程 7年前 (2019-07-16) 5874浏览 0评论
1.6.1 ROS的变换系统(TF) (1)TF简介 什么是TF。机器人系统通常具有许多随时间变化的坐标系,例如世界坐标系、基座坐标系、夹持器坐标系、头...
少儿编程 7年前 (2019-07-16) 8645浏览 0评论
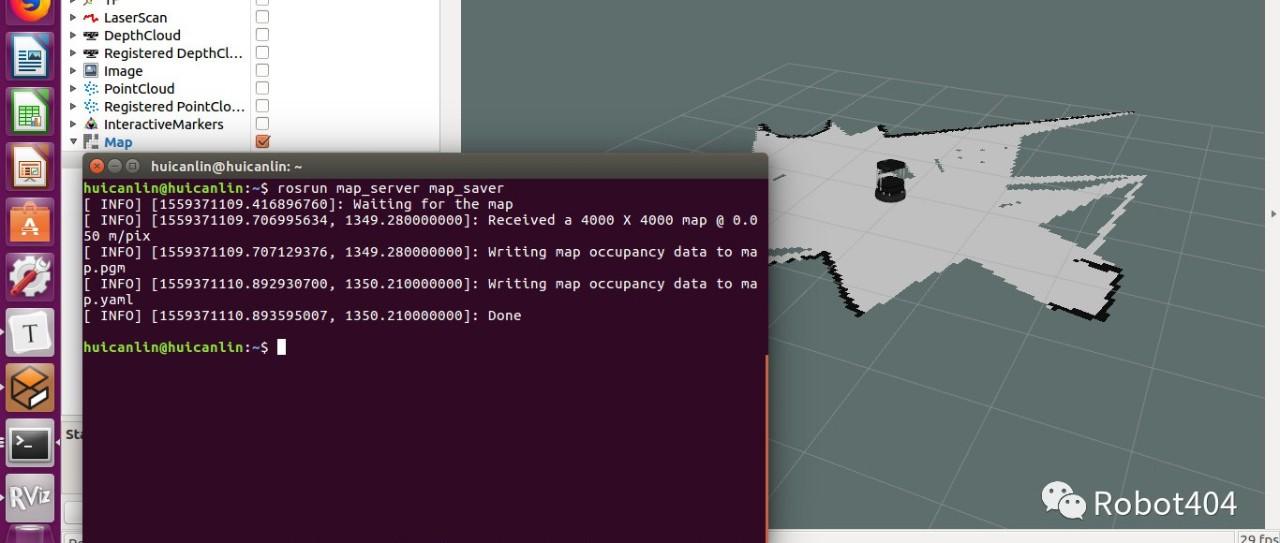
1.5.1 引言1.5.2 地图构建1.5.3 可视化工具rviz1.5.4 ROS 服务1.5.5 载入地图练习题 1.5.1 引言 为什么需...

少儿编程 7年前 (2019-07-16) 4957浏览 0评论
目 录 1.4.1 Gazebo 仿真器 1.4.2 读取传感器数据 1.4.3 漫游机器人 &...
少儿编程 7年前 (2019-07-16) 3369浏览 0评论
ROS提供了较为丰富的内置消息类型,如"std_msgs"包定义了原始消息类型: 上述原始类型用于构建ROS中使用的所有消息类型,例如,(大部分的...
少儿编程 7年前 (2019-07-16) 4180浏览 0评论
目 录 1.3.1 ROS Topics(话题) 1.3.2 发布器和订阅器 1.3.3 roslaunch 1.3.4 速...
少儿编程 7年前 (2019-07-16) 3779浏览 0评论
5.2.1 引言 本例程探索如何深层次地与MATLAB中的Gazebo仿真器交互。主题包括创建简单的模型、增加链接和加入模型、将模型连接在一起和应用力到物...
少儿编程 7年前 (2019-07-16) 2382浏览 0评论
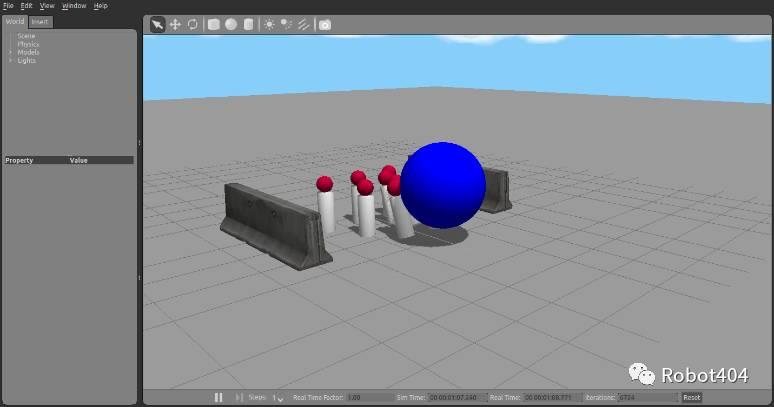
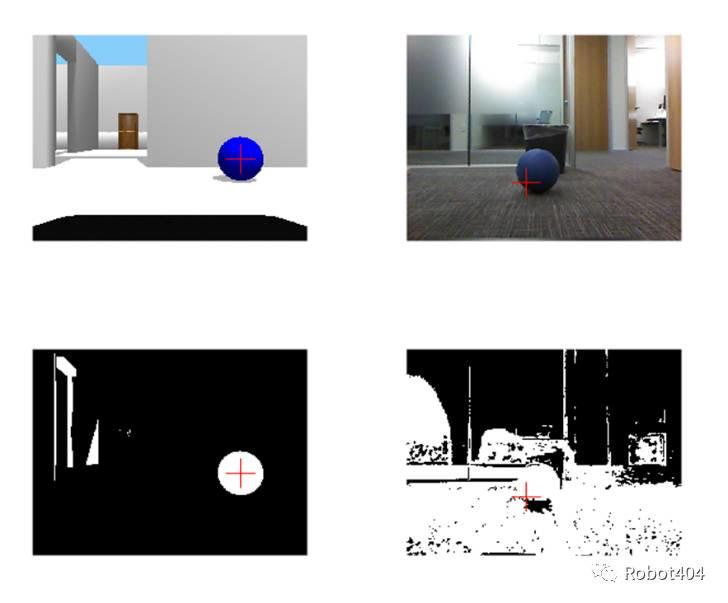
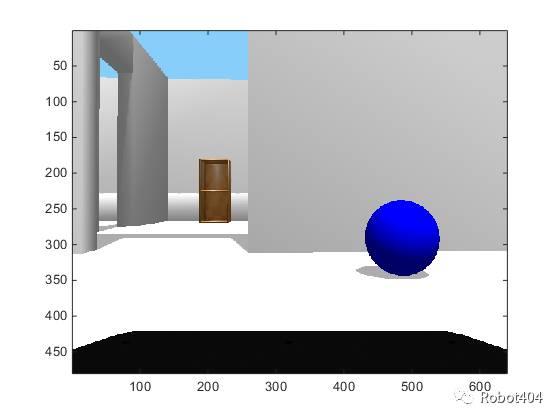
4.7.1 引言 在本例程中,用户将结合Kinect相机探索自主行为,该算法包含TurtleBot寻找蓝色球体和保持在球体的固定距离上。算法的实现依赖“E...
少儿编程 7年前 (2019-07-16) 2804浏览 0评论
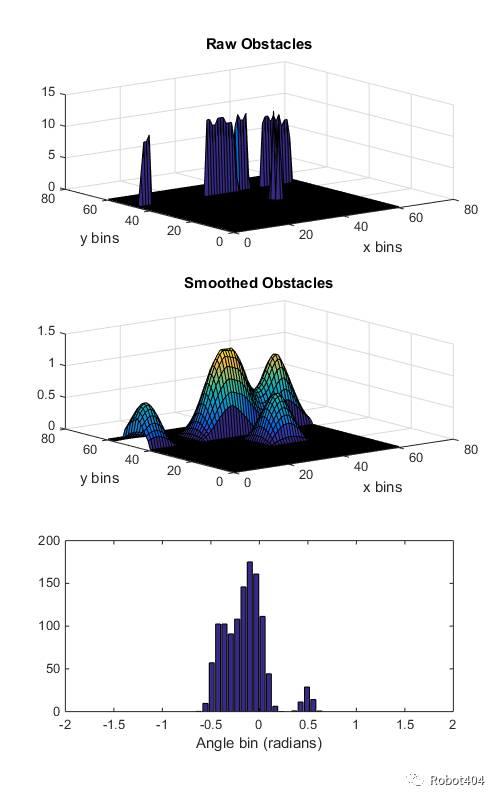
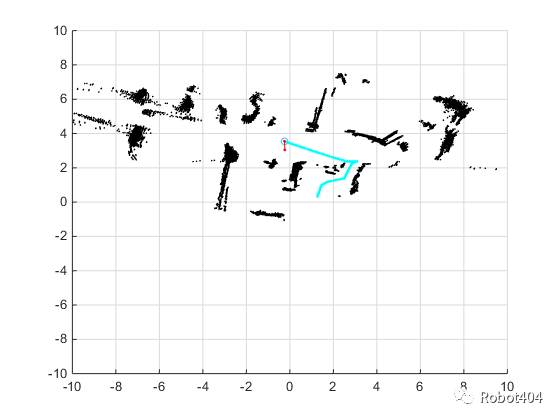
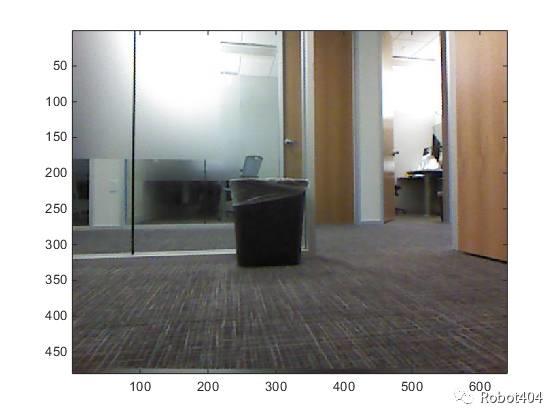
4.6.1 引言 本例程演示使用TurtleBot实现VFH+壁障算法,使用定时器显示了自主算法的性能。VFH+算法是一个简单、局部的...
少儿编程 7年前 (2019-07-16) 2479浏览 0评论
4.5.1 引言 本例程演示通过使用“ExampleHelperTurtleBotCommunicator”类,实现对TurtleBot的键盘控制。该说明...
少儿编程 7年前 (2019-07-16) 2265浏览 0评论
4.4.1 引言 本例程帮助用户使用TurtleBot探索基本的自主性。描述行为驱动机器人前进并在碰到障碍物的时候转弯。用户将会订阅激光扫描话题和发布速度...
少儿编程 7年前 (2019-07-16) 2407浏览 0评论
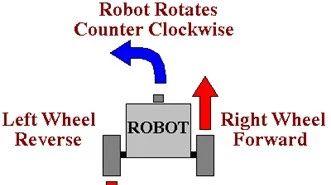
4.3.1 引言 本例程介绍TurtleBot平台和MATLAB用户与TurtleBot的交互方式。特别地,本例程的代码将演示如何发布消息(例如速度消息)...
少儿编程 7年前 (2019-07-16) 2989浏览 0评论
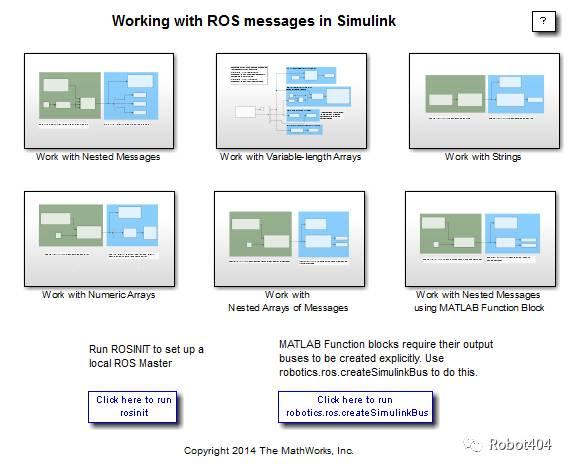
本例程展示如何在Simulink中使用复杂的ROS消息,例如带有嵌套子消息的消息或者多长度阵列消息。 2.5.1 引言 ROS消息在Simulink...
少儿编程 7年前 (2019-07-16) 3219浏览 0评论
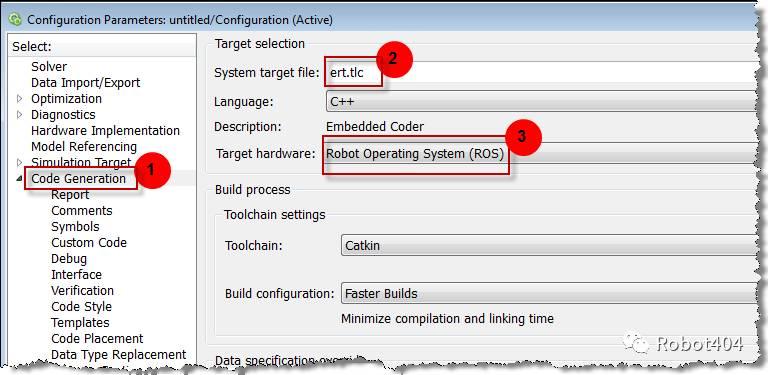
本例程向用户展示如何从Simulink模型生成和编译一个单独的ROS节点。 2.4.1 引言 在本例,用户将会配置一个模型为一个单独的ROS节点生成...