3.2 差动机器人的路径跟踪
少儿编程 7年前 (2019-07-16) 3121浏览 0评论
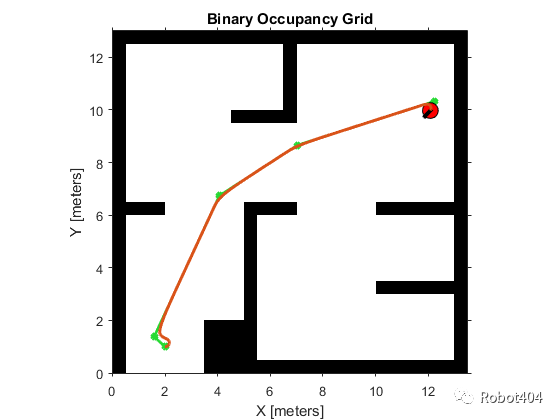
3.2.1 引言 该例程演示如何使用机器人运动模型控制机器人跟踪目标路径。该例程使用“Pure Persuit”路径跟踪控制器驱动仿真机器人沿着预先决定的...
少儿编程 7年前 (2019-07-16) 3121浏览 0评论
3.2.1 引言 该例程演示如何使用机器人运动模型控制机器人跟踪目标路径。该例程使用“Pure Persuit”路径跟踪控制器驱动仿真机器人沿着预先决定的...
少儿编程 7年前 (2019-07-16) 3032浏览 0评论
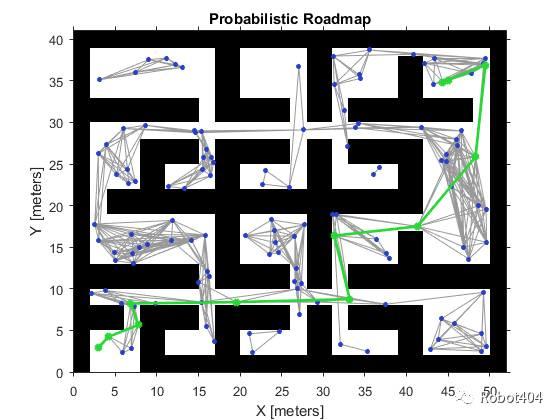
3.1.1 引言 本例程演示如何使用PRM(Probabilistic Roadmap)路径规划器在给定地图计算两个位置之间的无障碍路径。PRM路径规划器...
少儿编程 7年前 (2019-07-16) 3213浏览 0评论
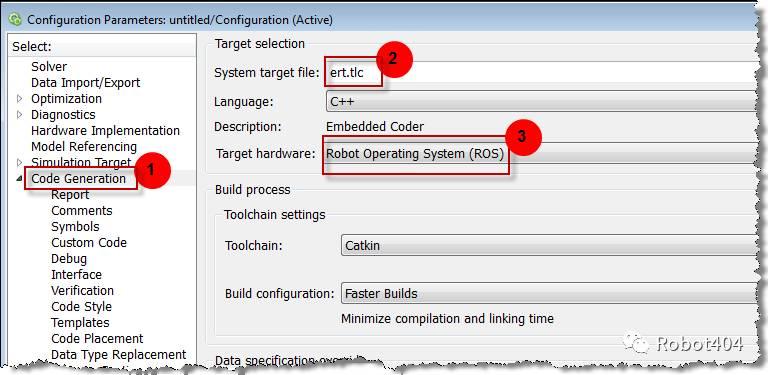
本例程向用户展示如何从Simulink模型生成和编译一个单独的ROS节点。 2.4.1 引言 在本例,用户将会配置一个模型为一个单独的ROS节点生成...
少儿编程 7年前 (2019-07-16) 2562浏览 0评论
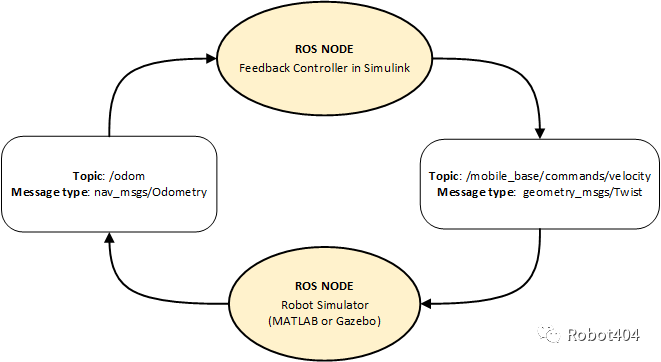
本例程将向用户展示如何使用Simulink控制仿真机器人运行于独立的基于ROS的仿真器。 2.3.1 引言 本例中,用户将会运行一个模型,实现一个简...
少儿编程 7年前 (2019-07-16) 2774浏览 0评论
本例程将向用户展示如何配置Simulink模型,用于发送和接收一个单独的基于ROS的仿真器,如Gazebo。 2.2.1 引言 用户可以使用Simu...
少儿编程 7年前 (2019-07-16) 4620浏览 0评论
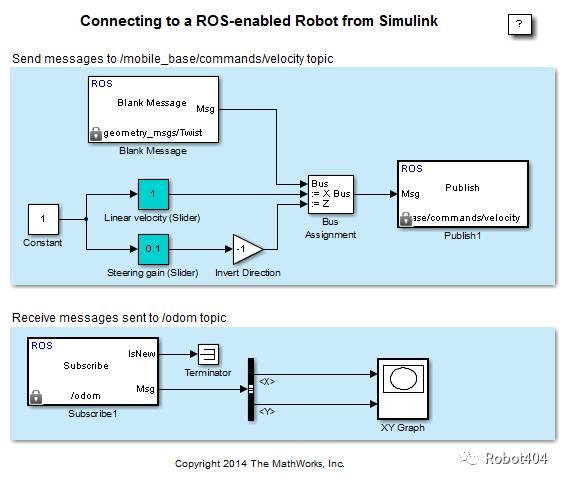
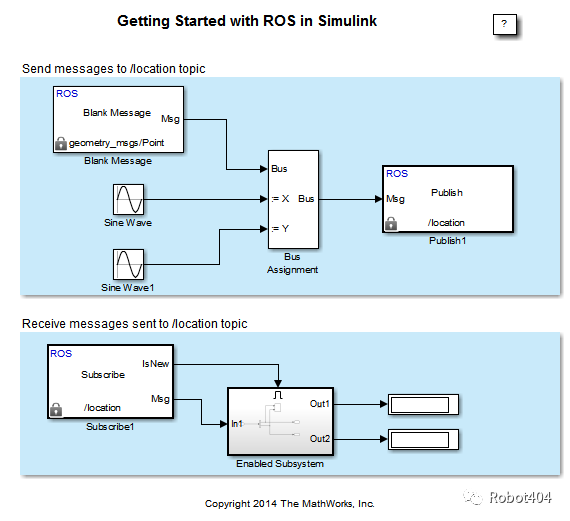
2.1 开始在Simulink中使用ROS 本例程展示如何使用Simulink在ROS网络中发送和接收消息。 2.1.1 引言 ...
少儿编程 7年前 (2019-07-16) 2866浏览 0评论
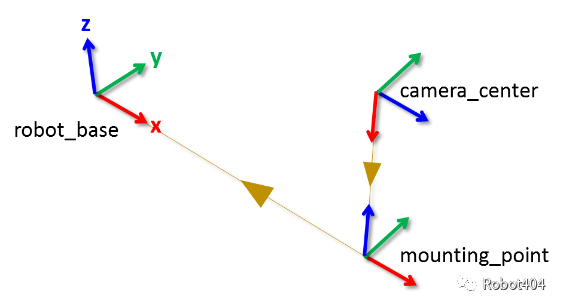
1.10.1 引言 ROS中的“tf”系统保持对多坐标系的跟踪并维护坐标系之间的关系于树型结构中。“tf”被分发,所以在ROS网络中的有关所有坐标系的信息...
少儿编程 7年前 (2019-07-16) 1954浏览 0评论
1.8 访问ROS参数服务器 1.8.1 引言 本例程将探索如何在ROS参数服务器上增加和恢复参数,参数服务器和ROS管理节点运行在相同的设备上。参数通...
少儿编程 7年前 (2019-07-16) 2917浏览 0评论
1.6 专业ROS消息的使用 1.6.1 引言 一些常见的ROS消息存储的格式,后期在使用之前需要进行转换。MATLAB能够帮助你转换常见的ROS消息格...
少儿编程 7年前 (2019-07-16) 2246浏览 0评论
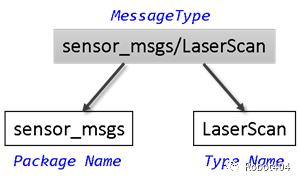
1.5 基本ROS消息的使用 1.5.1 引言 在ROS数据交换中消息是最主要的容器,主题(通过发布器和订阅器交换数据)和服务(请求和提供服务)都是使用...
少儿编程 7年前 (2019-07-16) 1941浏览 0评论
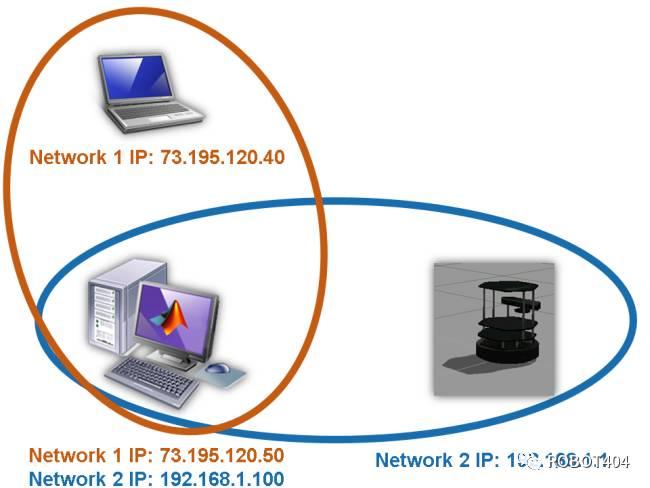
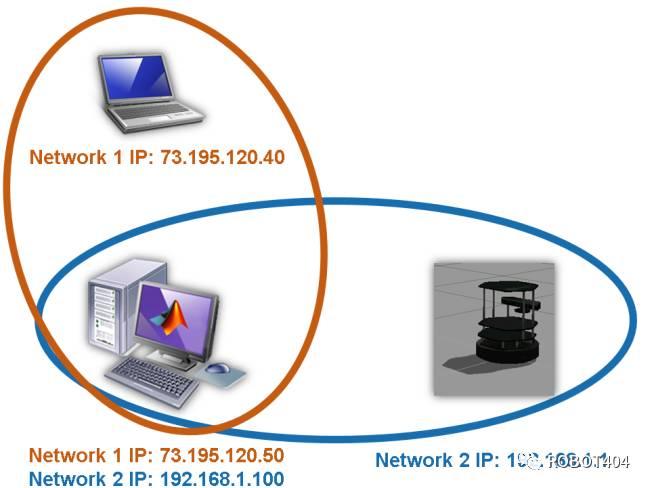
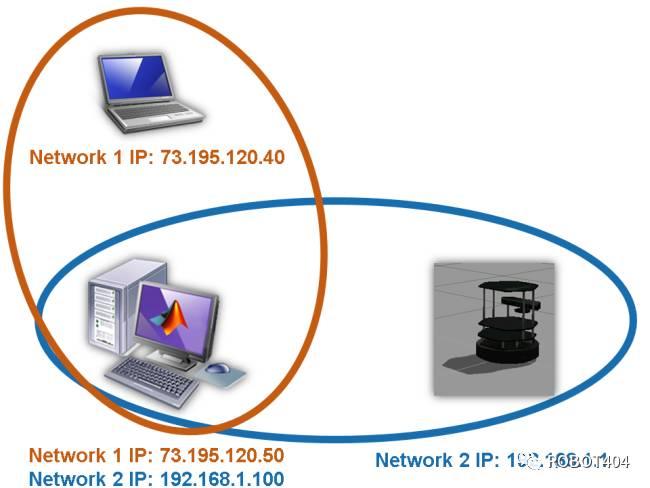
1.3 连接到ROS网络 1.3.1 引言 一个ROS网络包含一个ROS主控节点和多个ROS节点,ROS主控节点通过与所有活动的ROS实体保持联系使...
少儿编程 7年前 (2019-07-16) 1954浏览 0评论
1.2.1 引言 机器人操作系统(Robot Operating System ROS)是一个能够让机器人系统的不同部分发现、传输和接收数据的通信接口。M...

少儿编程 7年前 (2019-07-12) 3104浏览 0评论
本篇文章将使用树莓派与 ReSpeaker 4-Mic Array for Raspberry Pi 来完成语音识别的功能;并使用 ROS 1.0 系统...
少儿编程 7年前 (2019-07-10) 3311浏览 0评论
摘要:Arduino是一款开源的电子原型制作平台,借助Arduino与相应的传感器,我们可以设计实验装置用于科学探究。本文以声速测量装置的设计、制作和操作为...

少儿编程 7年前 (2019-07-07) 5077浏览 0评论
我们一定要承认自己的平凡、承认自己孩子的平凡,否则可能会很“伤脑筋”。不管期末考试考得怎么样,不管中考高考结果如何,生活还得继续。如果成绩不好就不能出去玩,...