ROS教程——1.11 基于行为的机器人
少儿编程 6年前 (2020-03-18) 2918浏览 0评论
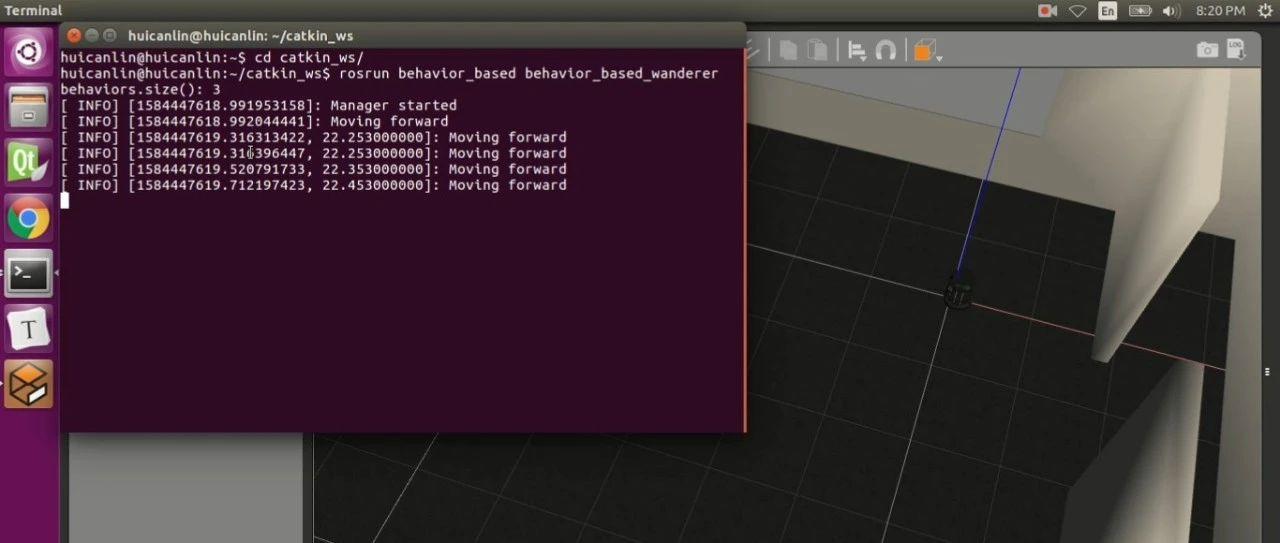
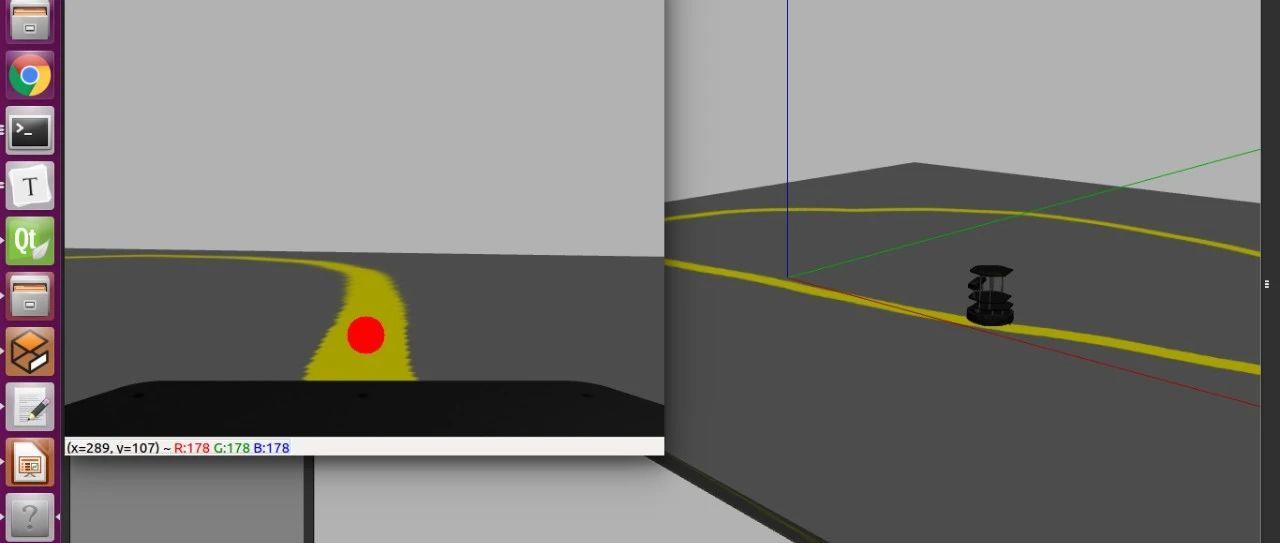
本文简介基于行为的机器人的概念和机器人控制思想,基于ROS使用gazebo进行了编程实践演练。演练中的环境采用柳树车库办公室场景,机器人使用了turtl...
少儿编程 6年前 (2020-03-18) 2918浏览 0评论
本文简介基于行为的机器人的概念和机器人控制思想,基于ROS使用gazebo进行了编程实践演练。演练中的环境采用柳树车库办公室场景,机器人使用了turtl...
少儿编程 6年前 (2020-03-14) 4112浏览 0评论
1.10.1 简介OpenCV OpenCV是开源计算机视觉库,由英特尔创建/维护,包含许多流行的计算机视觉算法的实现,高效且经过充分测试,专注于实时图像...
少儿编程 6年前 (2020-03-11) 4859浏览 0评论
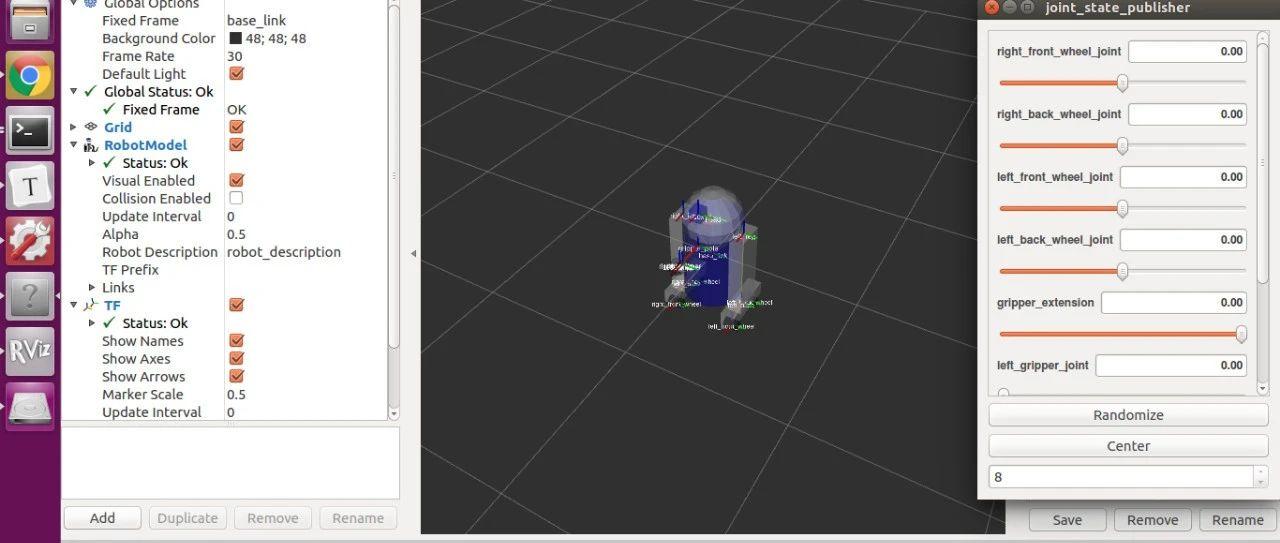
1.9.1 使用URDF构建机器人模型 统一机器人描述格式(Unified Robot Description Format , URDF)是一种XML格...
少儿编程 6年前 (2020-03-11) 3869浏览 0评论
1.8.1 ROS actions 尽管服务(service)对于简单的获取/设置交互(例如查询状态和管理配置)非常方便,但它们不适用于长时间运行的任务。...
少儿编程 7年前 (2019-09-09) 6306浏览 0评论
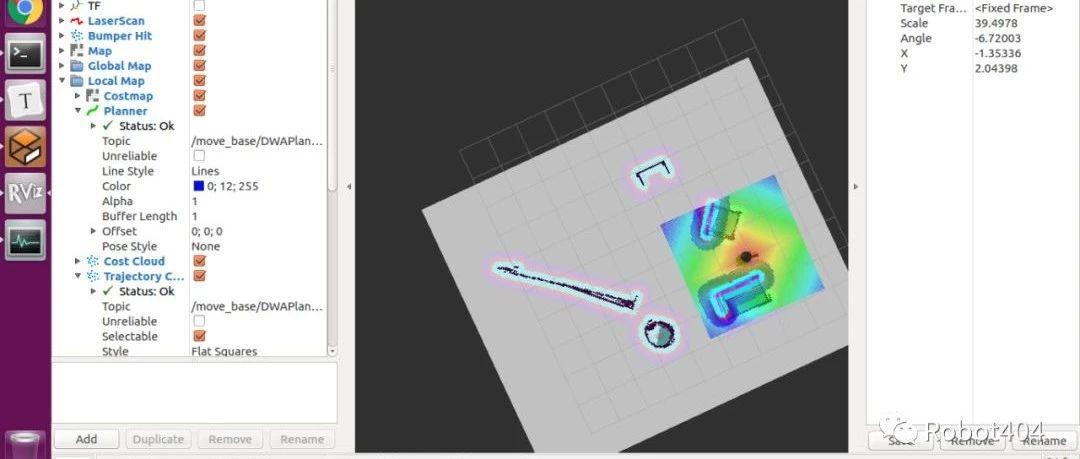
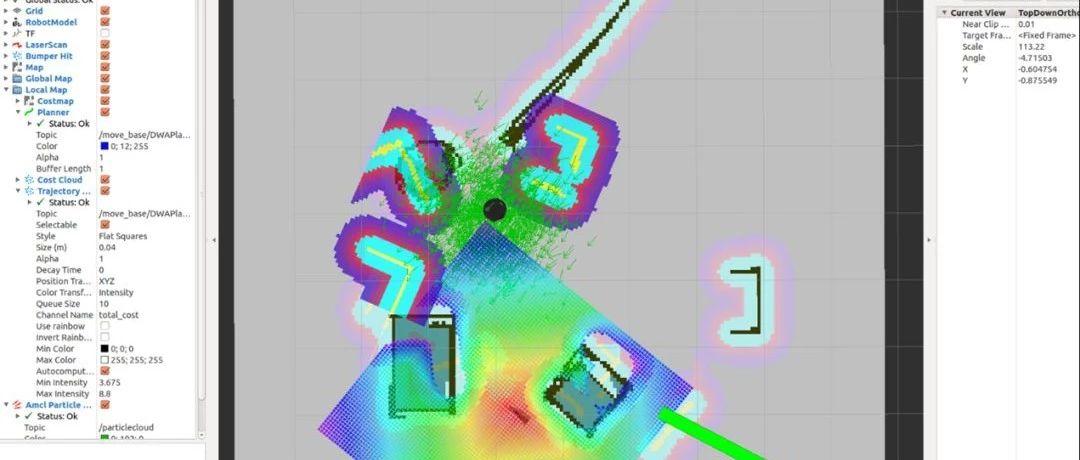
1.7.1 机器人导航 机器人最基本功能之一就是在环境中运动。为了有效地做到这一点,机器人需要知道它在哪里以及应该去哪里。通常情况下,需要为机器人提供环境...

少儿编程 7年前 (2019-07-16) 5904浏览 0评论
1.6.1 ROS的变换系统(TF) (1)TF简介 什么是TF。机器人系统通常具有许多随时间变化的坐标系,例如世界坐标系、基座坐标系、夹持器坐标系、头...
少儿编程 7年前 (2019-07-16) 8673浏览 0评论
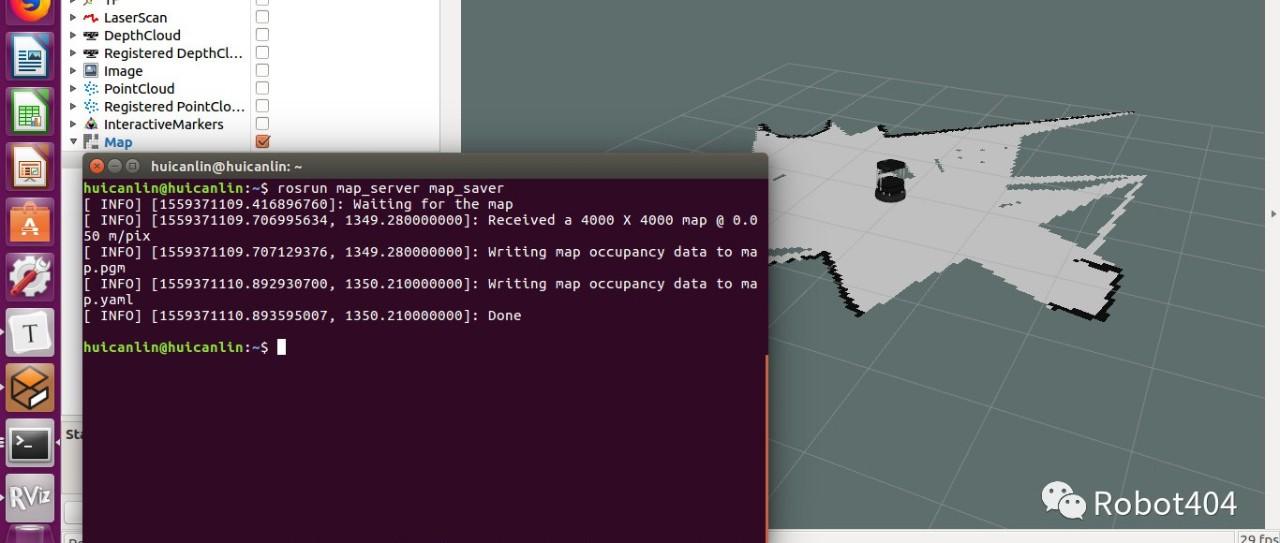
1.5.1 引言1.5.2 地图构建1.5.3 可视化工具rviz1.5.4 ROS 服务1.5.5 载入地图练习题 1.5.1 引言 为什么需...

少儿编程 7年前 (2019-07-16) 4983浏览 0评论
目 录 1.4.1 Gazebo 仿真器 1.4.2 读取传感器数据 1.4.3 漫游机器人 &...
少儿编程 7年前 (2019-07-16) 3382浏览 0评论
ROS提供了较为丰富的内置消息类型,如"std_msgs"包定义了原始消息类型: 上述原始类型用于构建ROS中使用的所有消息类型,例如,(大部分的...
少儿编程 7年前 (2019-07-16) 4190浏览 0评论
目 录 1.3.1 ROS Topics(话题) 1.3.2 发布器和订阅器 1.3.3 roslaunch 1.3.4 速...
少儿编程 7年前 (2019-07-16) 2968浏览 0评论
目 录 1.2.1 ROS的开发环境设置 1.2.2 ROS的包(软件包)结构 1.2.3 编写第一个节点 1.2.4 执行和调试...
少儿编程 7年前 (2019-07-16) 3845浏览 0评论
目 录 ROS简介 ROS主要特征 ROS主要概念 基本的ROS命令 Turtles...