Go语言字符串拼接(连接)
7年前 (2019-07-16) 3000浏览 0评论
连接字符串这么简单,还需要学吗?确实,Go 语言和大多数其他语言一样,使用+对字符串进行连接操作,非常直观。但问题来了,好的事物并非完美,简单的东西未必高效。除...
7年前 (2019-07-16) 3000浏览 0评论
连接字符串这么简单,还需要学吗?确实,Go 语言和大多数其他语言一样,使用+对字符串进行连接操作,非常直观。但问题来了,好的事物并非完美,简单的东西未必高效。除...
7年前 (2019-07-16) 3127浏览 0评论
Go 语言的字符串无法直接修改每一个字符元素,只能通过重新构造新的字符串并赋值给原来的字符串变量实现。请参考下面的代码: angel := "Heros ne...
7年前 (2019-07-16) 3648浏览 0评论
获取字符串的某一段字符是开发中常见的操作,我们一般将字符串中的某一段字符称做子串(substring)。下面例子中使用 strings.Index() 函数在字...
7年前 (2019-07-16) 3313浏览 0评论
遍历字符串有下面两种写法。 遍历每一个ASCII字符 遍历 ASCII 字符使用 for 的数值循环进行遍历,直接取每个字符串的下标获取 ASCII 字符,...
7年前 (2019-07-16) 3514浏览 0评论
Go 语言的内建函数 len(),可以用来获取切片、字符串、通道(channel)等的长度。下面的代码可以用 len() 来获取字符串的长度。 tip1 :=...

7年前 (2019-07-16) 5856浏览 0评论
1.6.1 ROS的变换系统(TF) (1)TF简介 什么是TF。机器人系统通常具有许多随时间变化的坐标系,例如世界坐标系、基座坐标系、夹持器坐标系、头...
7年前 (2019-07-16) 8620浏览 0评论
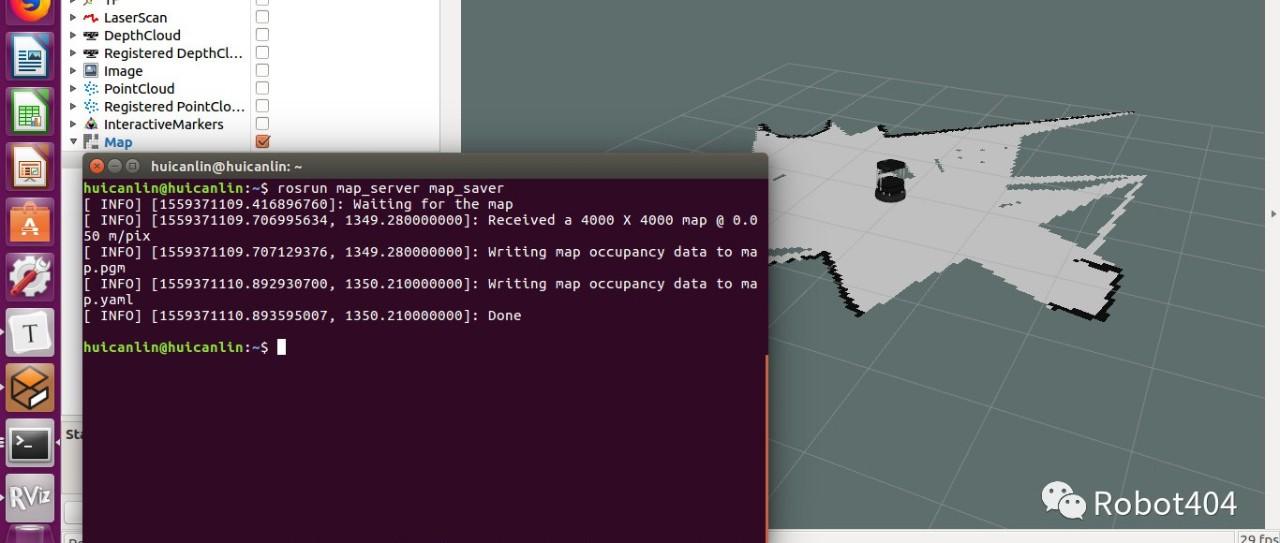
1.5.1 引言1.5.2 地图构建1.5.3 可视化工具rviz1.5.4 ROS 服务1.5.5 载入地图练习题 1.5.1 引言 为什么需...

7年前 (2019-07-16) 4941浏览 0评论
目 录 1.4.1 Gazebo 仿真器 1.4.2 读取传感器数据 1.4.3 漫游机器人 &...
7年前 (2019-07-16) 3357浏览 0评论
ROS提供了较为丰富的内置消息类型,如"std_msgs"包定义了原始消息类型: 上述原始类型用于构建ROS中使用的所有消息类型,例如,(大部分的...
7年前 (2019-07-16) 4172浏览 0评论
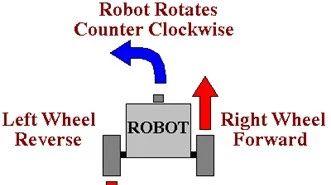
目 录 1.3.1 ROS Topics(话题) 1.3.2 发布器和订阅器 1.3.3 roslaunch 1.3.4 速...
7年前 (2019-07-16) 2933浏览 0评论
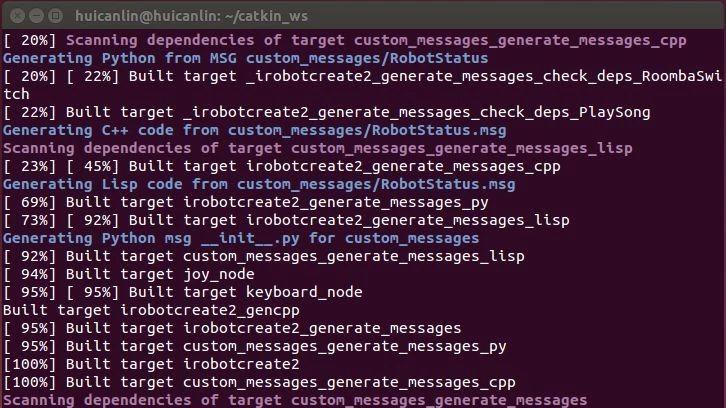
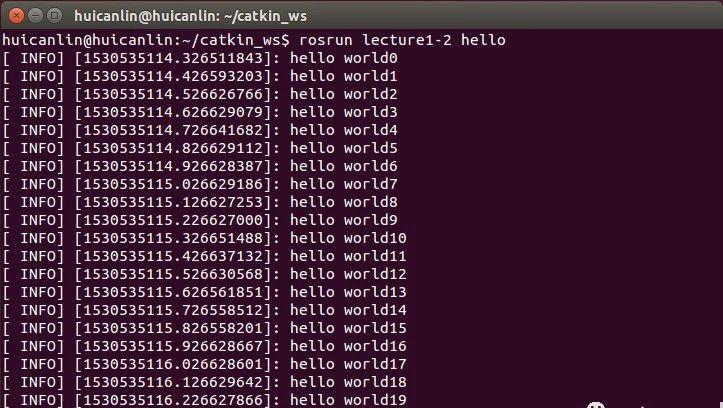
目 录 1.2.1 ROS的开发环境设置 1.2.2 ROS的包(软件包)结构 1.2.3 编写第一个节点 1.2.4 执行和调试...
7年前 (2019-07-16) 3824浏览 0评论
目 录 ROS简介 ROS主要特征 ROS主要概念 基本的ROS命令 Turtles...
7年前 (2019-07-16) 2505浏览 0评论
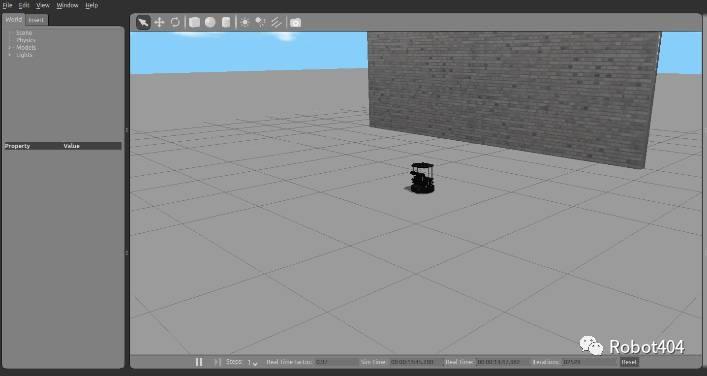
5.4.1 引言 本例程探索Gazebo仿真器的MATLAB控制。在仿真应用领域,在仿真运行期间测试算法的自主性和动态更改世界环境是非常重要的。本例程演示...
7年前 (2019-07-16) 3487浏览 0评论
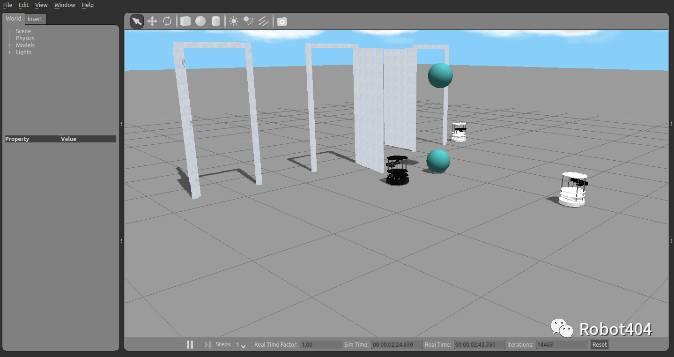
5.3.1 引言 本例程演示应用力和力矩到Gazebo仿真器中的模型的一些方法。首先,使用门作为图解验证了三种力矩应用的方法;其次,两个TurtleBot...
7年前 (2019-07-16) 3771浏览 0评论
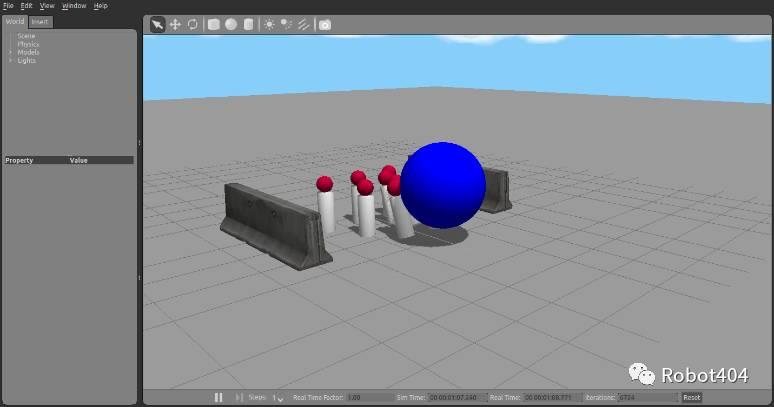
5.2.1 引言 本例程探索如何深层次地与MATLAB中的Gazebo仿真器交互。主题包括创建简单的模型、增加链接和加入模型、将模型连接在一起和应用力到物...