第2章 Simulink ROS例程——2.1 开始在Simulink中使用ROS
7年前 (2019-07-16) 4618浏览 0评论
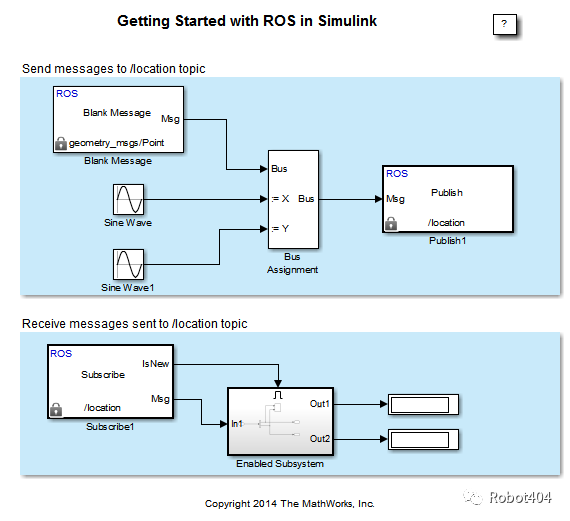
2.1 开始在Simulink中使用ROS 本例程展示如何使用Simulink在ROS网络中发送和接收消息。 2.1.1 引言 ...
7年前 (2019-07-16) 4618浏览 0评论
2.1 开始在Simulink中使用ROS 本例程展示如何使用Simulink在ROS网络中发送和接收消息。 2.1.1 引言 ...
7年前 (2019-07-16) 2859浏览 0评论
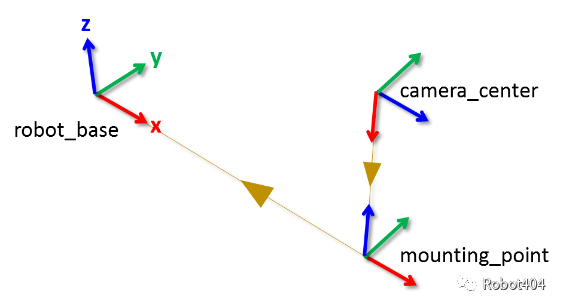
1.10.1 引言 ROS中的“tf”系统保持对多坐标系的跟踪并维护坐标系之间的关系于树型结构中。“tf”被分发,所以在ROS网络中的有关所有坐标系的信息...
7年前 (2019-07-16) 2998浏览 0评论
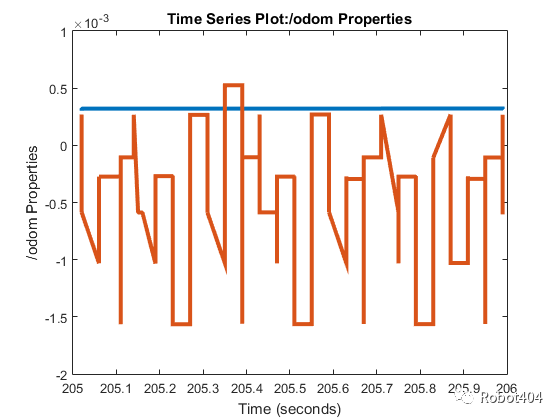
1.9 rosbag Logfiles的使用 1.9.1 引言 预备知识:1.5 基本ROS消息的使用。 1.9.2 载入rosbag 使用“r...
7年前 (2019-07-16) 1946浏览 0评论
1.8 访问ROS参数服务器 1.8.1 引言 本例程将探索如何在ROS参数服务器上增加和恢复参数,参数服务器和ROS管理节点运行在相同的设备上。参数通...
7年前 (2019-07-16) 2015浏览 0评论
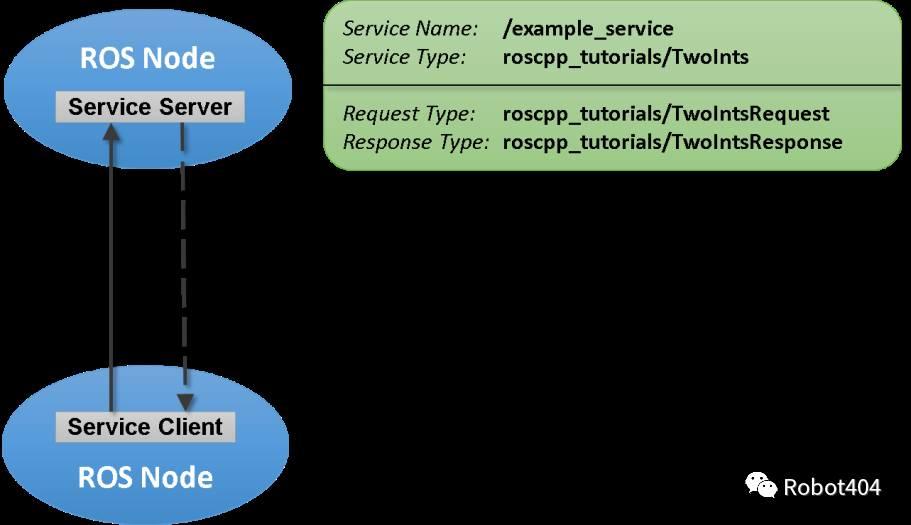
1.7 请求和提供服务 1.7.1 引言 ROS支持两种主要的通信机制:话题和服务。话题拥有发布器和订阅器,用于发送和接收消息(参阅使用发布器和订阅器交...
7年前 (2019-07-16) 2908浏览 0评论
1.6 专业ROS消息的使用 1.6.1 引言 一些常见的ROS消息存储的格式,后期在使用之前需要进行转换。MATLAB能够帮助你转换常见的ROS消息格...
7年前 (2019-07-16) 2235浏览 0评论
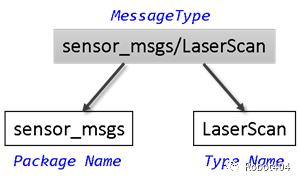
1.5 基本ROS消息的使用 1.5.1 引言 在ROS数据交换中消息是最主要的容器,主题(通过发布器和订阅器交换数据)和服务(请求和提供服务)都是使用...
7年前 (2019-07-16) 2397浏览 0评论
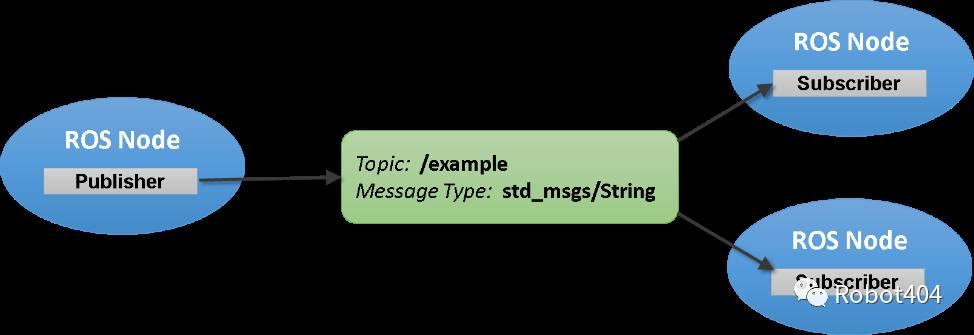
1.4 使用发布器和订阅器交换数据 1.4.1 引言 ROS节点最基本的交换数据的方式是发送和接收消息。消息通过主题传输,在ROS网...
7年前 (2019-07-16) 1930浏览 0评论
1.3 连接到ROS网络 1.3.1 引言 一个ROS网络包含一个ROS主控节点和多个ROS节点,ROS主控节点通过与所有活动的ROS实体保持联系使...
7年前 (2019-07-16) 1945浏览 0评论
1.2.1 引言 机器人操作系统(Robot Operating System ROS)是一个能够让机器人系统的不同部分发现、传输和接收数据的通信接口。M...
7年前 (2019-07-16) 2552浏览 0评论
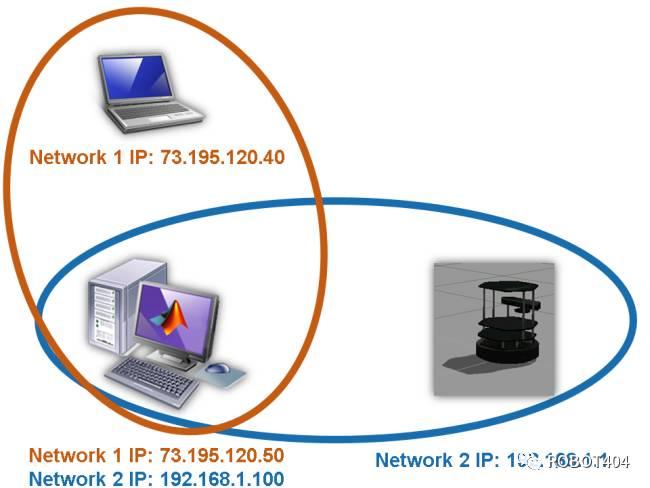
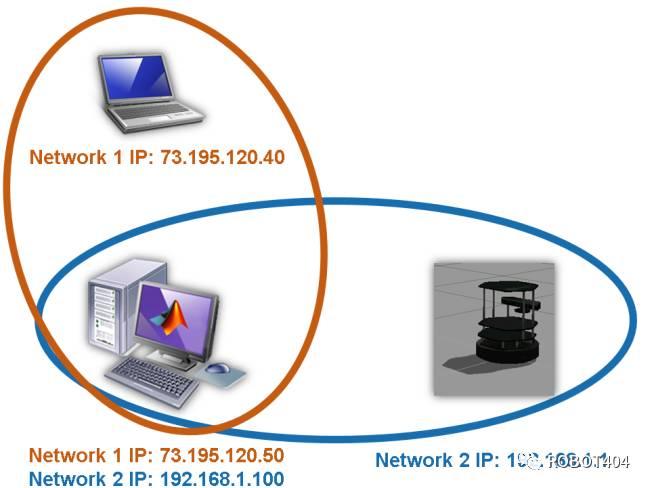
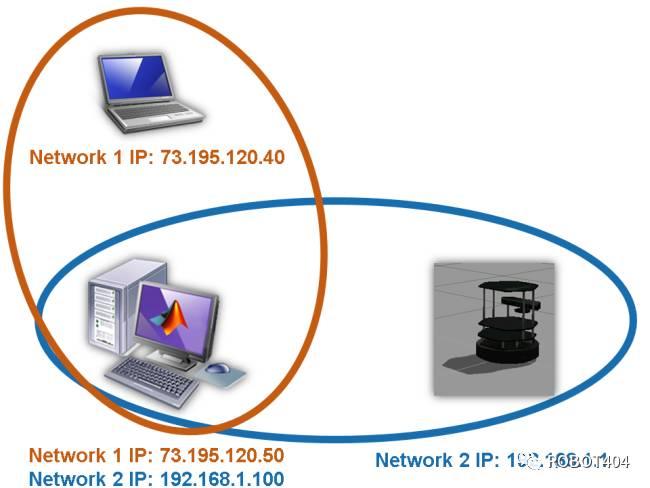
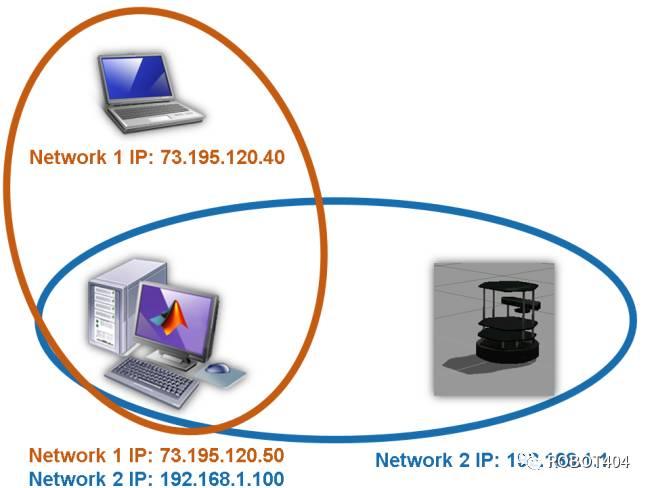
1.1 ROS网络设置 1.1.1 引言 设置ROS网络使得不同的设备之间能够通信。不同的参与者或者节点通过注册到同一个ROS主控节点实现信息共享。RO...
7年前 (2019-07-16) 4670浏览 0评论
先放出一段视频。 怎么样,听到这熟稔而又激昂的乐曲,是不是有些热血沸腾呢?是不是又回忆起年少时和小伙伴们一起征...
7年前 (2019-07-16) 6837浏览 0评论
1、下载 下载网址:https://scratch.mit.edu/download 小提示:如果您打开的页面为英文,那么,您可以在页面的最...

7年前 (2019-07-16) 2993浏览 0评论
今天,我给大家带来《Scratch入门教程系列》第六讲《变装游戏(二)》。 基础准备 年龄要求:6岁+ 难度:简单 编写时间:4...
7年前 (2019-07-16) 3749浏览 0评论
今天,我给大家带来《Scratch入门教程系列》的第五讲《变装游戏(一)》。 基础准备 年龄要求:6岁+ 难度:简单 编写时间:...