4.2 开始使用Gazebo和仿真的TurtleBot
少儿编程 7年前 (2019-07-16) 2369浏览 0评论
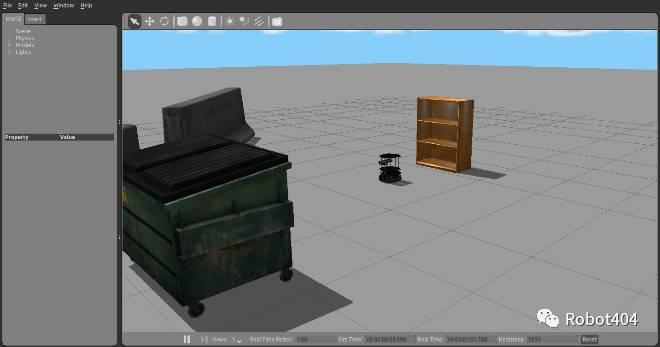
4.2.1 引言 本例程将展示如何启动Gazebo仿真器引擎,该例程是下一步探索Gazebo和仿真TurtleBot做准备。Gazebo是一个仿真器,允许...
少儿编程 7年前 (2019-07-16) 2369浏览 0评论
4.2.1 引言 本例程将展示如何启动Gazebo仿真器引擎,该例程是下一步探索Gazebo和仿真TurtleBot做准备。Gazebo是一个仿真器,允许...
少儿编程 7年前 (2019-07-16) 1892浏览 0评论
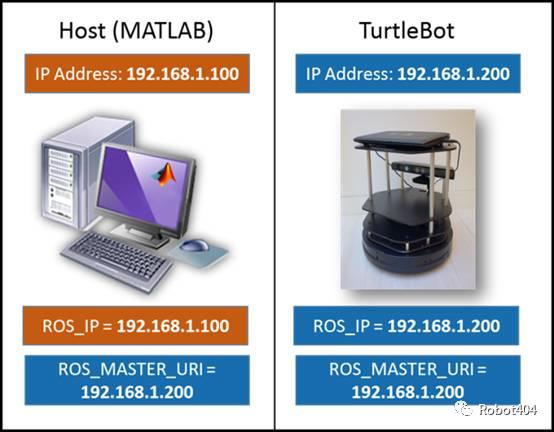
4.1.1 引言 本例程演示如何使用MATLAB的ROS接口连接到TurtleBot,用户可以使用该接口从MATLAB连接到许多ROS支持的硬件。用户也可...
少儿编程 7年前 (2019-07-16) 2977浏览 0评论
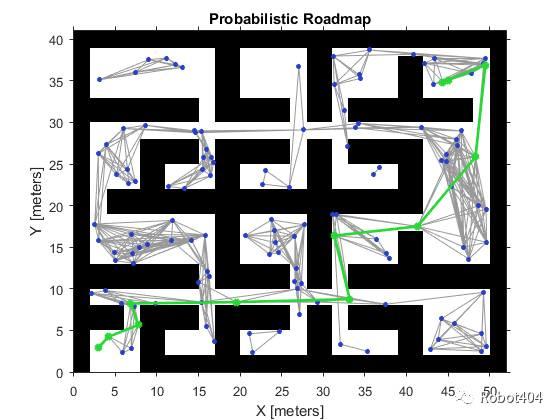
3.1.1 引言 本例程演示如何使用PRM(Probabilistic Roadmap)路径规划器在给定地图计算两个位置之间的无障碍路径。PRM路径规划器...
少儿编程 7年前 (2019-07-16) 3135浏览 0评论
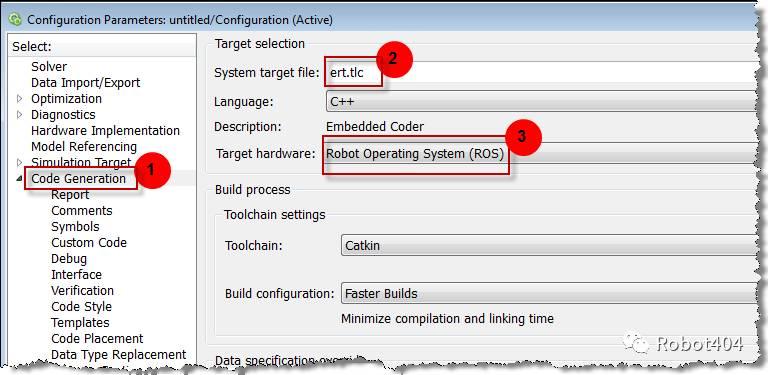
本例程向用户展示如何从Simulink模型生成和编译一个单独的ROS节点。 2.4.1 引言 在本例,用户将会配置一个模型为一个单独的ROS节点生成...
少儿编程 7年前 (2019-07-16) 4571浏览 0评论
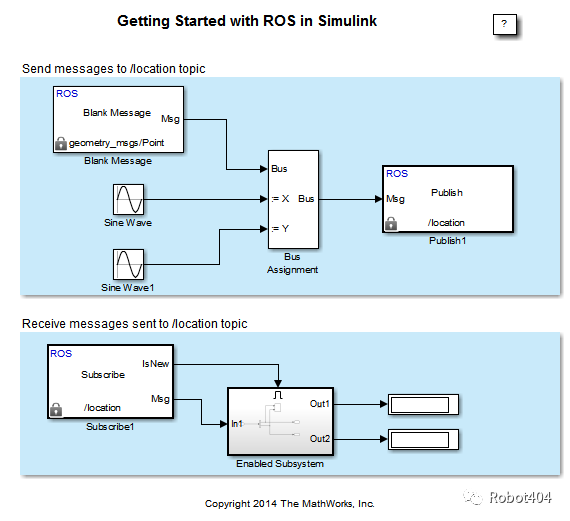
2.1 开始在Simulink中使用ROS 本例程展示如何使用Simulink在ROS网络中发送和接收消息。 2.1.1 引言 ...
少儿编程 7年前 (2019-07-16) 1978浏览 0评论
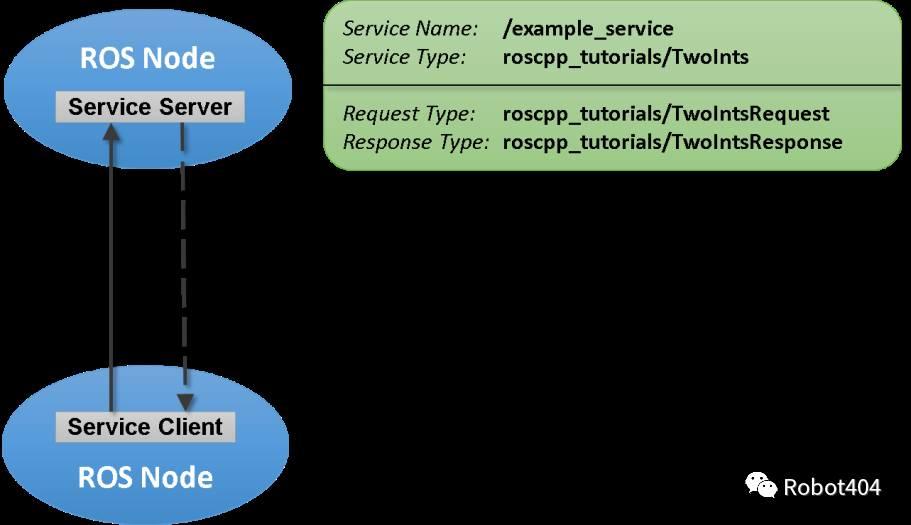
1.7 请求和提供服务 1.7.1 引言 ROS支持两种主要的通信机制:话题和服务。话题拥有发布器和订阅器,用于发送和接收消息(参阅使用发布器和订阅器交...
少儿编程 7年前 (2019-07-16) 2826浏览 0评论
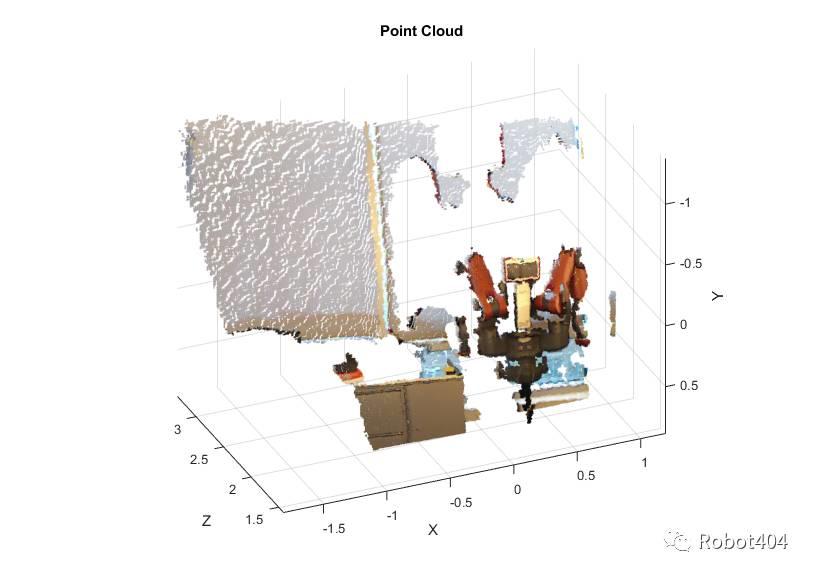
1.6 专业ROS消息的使用 1.6.1 引言 一些常见的ROS消息存储的格式,后期在使用之前需要进行转换。MATLAB能够帮助你转换常见的ROS消息格...
少儿编程 7年前 (2019-07-16) 2171浏览 0评论
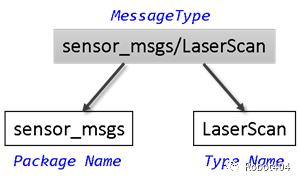
1.5 基本ROS消息的使用 1.5.1 引言 在ROS数据交换中消息是最主要的容器,主题(通过发布器和订阅器交换数据)和服务(请求和提供服务)都是使用...
少儿编程 7年前 (2019-07-16) 2340浏览 0评论
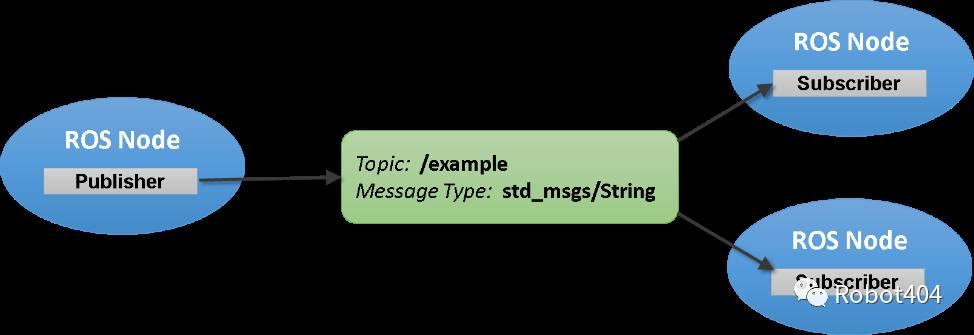
1.4 使用发布器和订阅器交换数据 1.4.1 引言 ROS节点最基本的交换数据的方式是发送和接收消息。消息通过主题传输,在ROS网...
少儿编程 7年前 (2019-07-16) 1860浏览 0评论
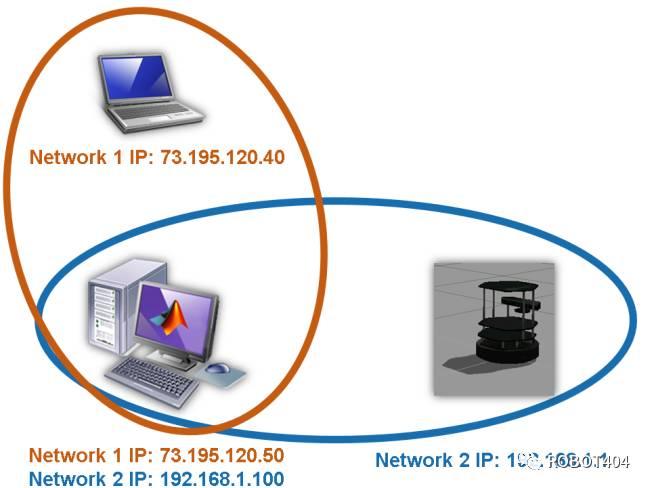
1.3 连接到ROS网络 1.3.1 引言 一个ROS网络包含一个ROS主控节点和多个ROS节点,ROS主控节点通过与所有活动的ROS实体保持联系使...

少儿编程 7年前 (2019-07-16) 3530浏览 0评论
今天,我给大家带来《Scratch入门教程系列》的第三讲《大鱼吃小鱼》。 基础准备 年龄要求:6岁+ 难度:简单 编写时间:30...
少儿编程 7年前 (2019-07-15) 2384浏览 0评论
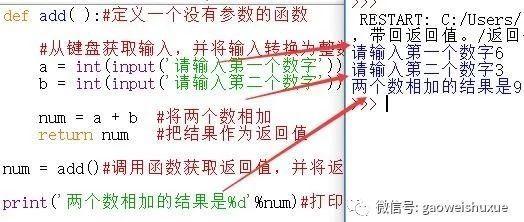
各位小伙伴大家好: 上期我们学习了带参数的函数,通过传递参数我们可以用同一段代码来实现不同效果。 今天我们继续来学习函数...
少儿编程 7年前 (2019-07-15) 3509浏览 0评论
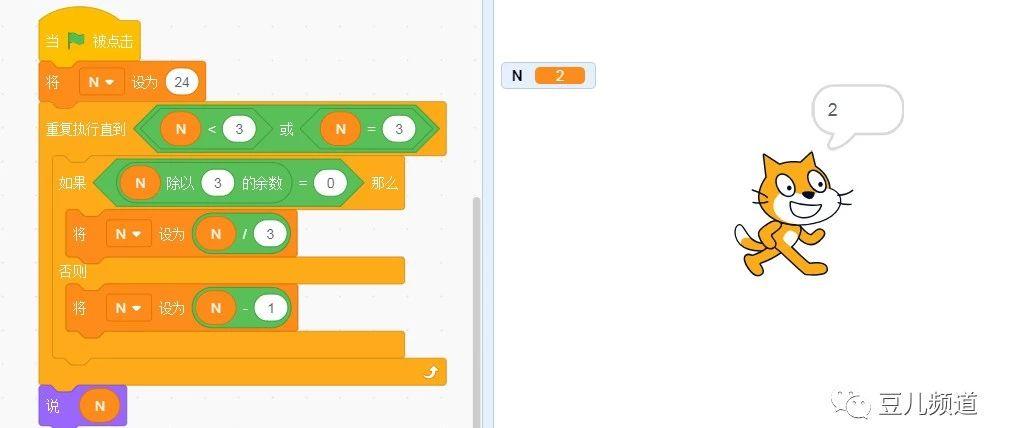
循 环 输 出 了解到在去年各地的高考数学题中都有出现和编程相关的题目,题目类型都差不多,都是一段伪代码,然后需要计...

少儿编程 7年前 (2019-07-15) 7505浏览 0评论
呱妈最近去了一趟上海,感受最深的就是,扔垃圾真的是要小心翼翼啊,每次都在蹲在垃圾桶前对照半天,才敢扔进去。 实在不确定的,要在手机上查了才敢扔进去。 ...

少儿编程 7年前 (2019-07-12) 4080浏览 0评论
前几次课都是有了一个idea,程序实现后先录制成课,再回来写相关文章,可是几次下来发现懒惰成性,有些课程内容一拖再拖还没补上,这回实现后决定逆向而行,先...