
码丁实验室,一站式儿童编程学习产品,寻地方代理合作共赢,微信联系:leon121393608。
")
先贴上视频,看看效果:
需要的原件列表:
arduino uno 一块;
蓝牙模块一个(本例中采用的是BlueTooth Bee B2.0)
arduino IO扩展板一个(本例中使用的是DFRobot 的IOV7)
360度舵机两个(本例中使用MG 996R)
锂电池一个(本例中使用的是4000mah 7.4V)
万向轮一个
硬纸板两块(用来做车身与两个轮子)
特别说明:
元件不一定要和上面列出来的一样,我选的蓝牙模块要和IO扩展板配套,如果选择正常的蓝牙模块,则该IO扩展板就不是必须的了,锂电车可以用其他电池替代(6到12V都可以,推荐锂电池)。
主要元件如下图:
")

")
")
轮子与车身制作:
使用剪刀剪出两个圆形的轮子,并安装到舵机上,如图:
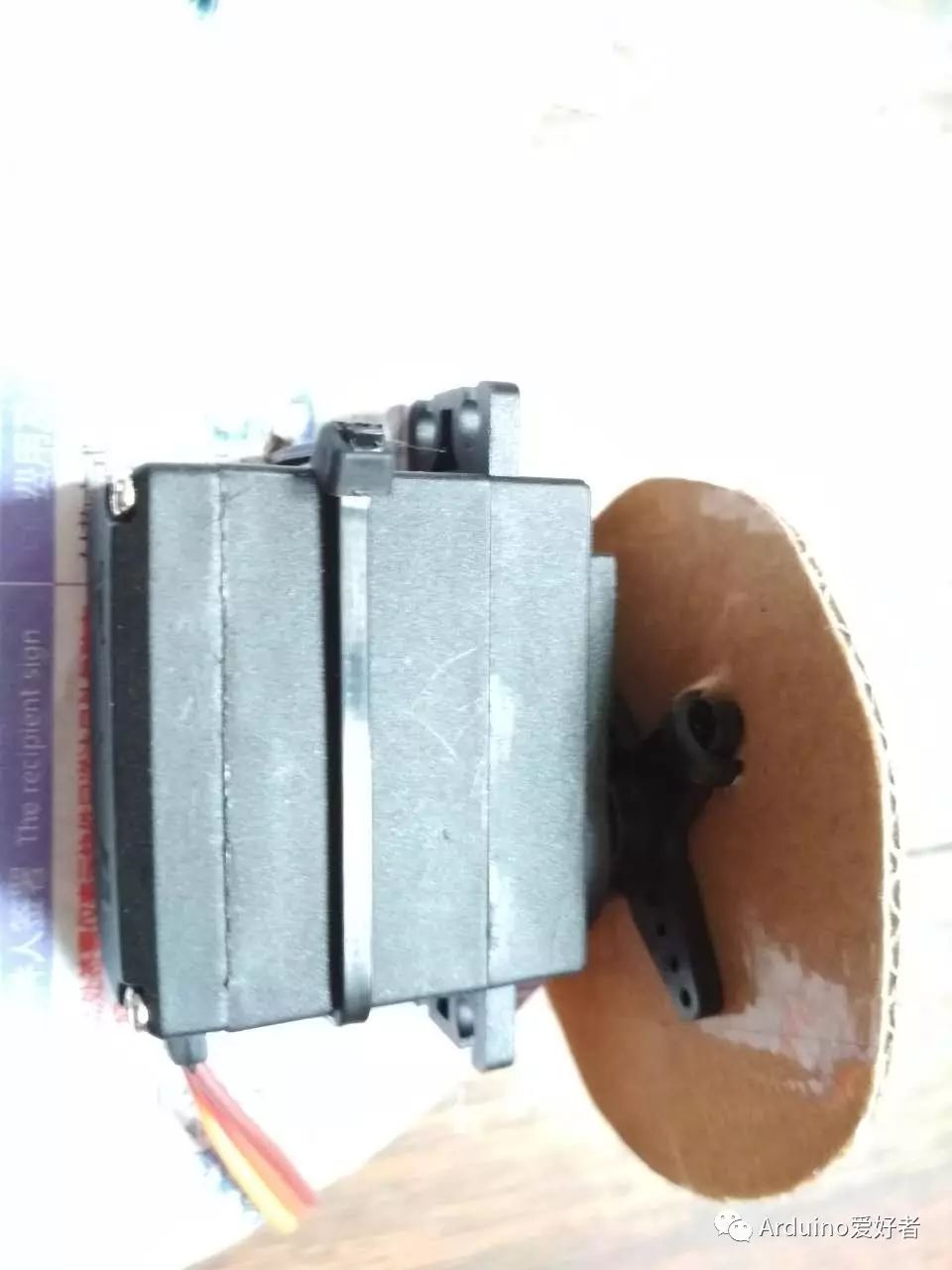

用剪刀剪出车身,并将三个轮子安装上,效果如图:
")
")
车体制作完毕。
舵机介绍:
arduino中有个控制舵机的库Servo,其不仅可以控制一般的舵机,也可以控制360度连续旋转舵机。
一般的舵机的旋转角度范围是0-180度,对应Servo库中的函数便是write(0)和write(180)。
但是对于360度连续旋转舵机来说,一般情况下write(180)对应着正转最快,write(90)对应着停止write(0)对应着反转最快。
之所以说一般情况下,是因为舵机厂家不一样,参数会有所不同,例如有的舵机便是write(89)表示停止,我们在制作的时候,一定要先用arduino找到自己舵机对应的停止角度。
本例中使用的两个舵机的停止角度一个是96一个是89。
程序的原理是:
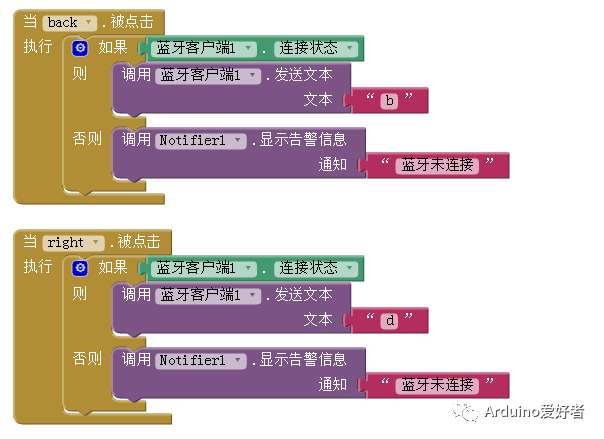
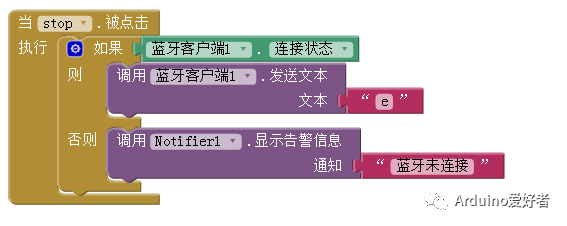
手机通过蓝牙串口发送不同的字符到arduino,arduino根据接收到的不同字符来调用相应的函数(例如前进,后退等)。
arduino源代码如下图:
")
")
")
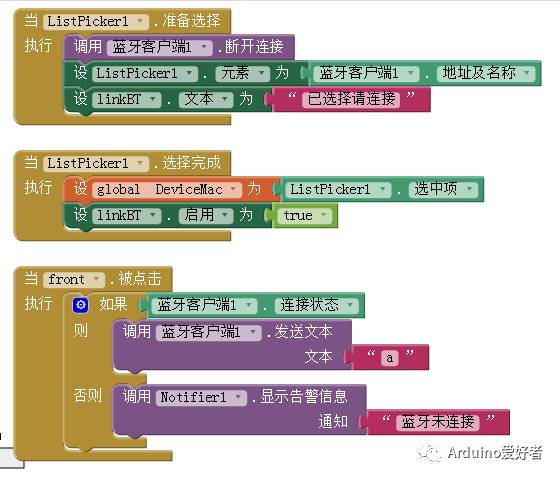
关于Android app :
本例中采用MIT 的APP Inventor 2开发(只有几个简单的按钮)
如下图:
")
")
")
有基础的可以自己开发一个漂亮点的,如果不想自己开发,下载地址如下:
链接: http://pan.baidu.com/s/1gfL1m87 密码: uruk
PS:
对于电源,最好舵机一套电源,arduino一套电源(两套电源共地(负极接一块)),本例中使用一套电源。如图:
")
")
PPS:
关于视频中刚开始的小车抖动,便是因为停止角度没有找准确造成的,大家多尝试。
PPPS:
附上ascii码表:
")